Please Choose Your Language
close
Choose Your Site
Global
Social Media



| Quantity: | |
|---|---|
| PDF Export | |








M215
SiRON
8503009090
About selection

Selection example: M215-AS04BB indicates the M215 series servo driver, with a power supply voltage of AC220V, single-axis output mode, power of 400W, control type of basic type, and encoder type of serial communication type.
Note: 1. The control type is the basic type. The basic type includes functions such as USB communication, Modbus, and command pulse input. 2. Power supply voltage AC220V: The power selectable range is 400 to 2000W.The M215 series servo driver can be matched with the M205 series servo motor.
Table 1: Power
| Code | 04 | 08 | 15 | 22 | 30 |
| Power | 400W | 750W | 1500W | 2200W | 3000W |
| Rated current | 2.8A | 5A | 6A | 8.4A | 12.5A |
Specification
| Name | M215series servo drive | ||
| Input power | Main circuit power supply | Three-phase AC220~240V(-15~+10%,50~60Hz) | |
| Control power | Single-phase AC220~240V(-15~+10%,50~60Hz) | ||
| Rated current | 0.4kW/2.8A,0.75kW/5.0A,1.0kW/6.0A,1.5kW/8.4A | ||
| Encoder feedback | one grounding room ata time,ACT500V,can withstand woltage for 1 minute (leakage trigger current 20mA)(200Vseries) | ||
| Encoder feedback | First code | 10,000-line incremental encoder 17bit;23-bit absolute value | |
| Conditions of Use | Use ambient temperature | -5~+45°℃(No freezing) | |
| Save ambient temperature | -20~+85℃ | ||
| Use/Storage Humidity | Below 95%RH(No freezing or condensation) | ||
| Vibration resistance | Below 5.88m/s 2,10 to 60Hz(cannot be used continuously at the resonant frequency) | ||
| Impact strength | 19.6m/s⊃2; | ||
| Altitude | It can be used normally for distances below 1000m. For distances between 1000 and 2000m, please use it with a reduced capacity | ||
| IO interface connector | Digital signal | Enter Output | There are 7 universal input channels. Select the power of the universal input according to the parameters |
| There are 4 universal input channels. Select the function of the universal output according to the parameters | |||
| Analog signal | Enter | 2 channels of 12-bit A/D,±10V | |
| Pulse signal | Enter | 2 Input; The maximum differential input is 4Mpps, and the pulse width must not be less than 0.125us. The input of the optocoupler is the largest 500Kpps, with a pulse width of no less than 1us(supports 5V input and 24V input respectively) | |
| Output | 4 Output; Phase differential output of A, B, and Z; Open-circuit output at the collector of phase Z | ||
| Communication function | USB(Type-C) | It can be connected to a computer for parameter setting, status monitoring, etc | |
| Modbus | 1:n communication for PLC, supporting Modbus-RTU and ASCII modes, with baud rates ranging from 400bps to 230400bps that can be set | ||
| Front panel | 5-digit keys and 6-digit LED display | ||
| Braking resistor | Built-in braking resistor(extemal type is also available) | ||
| Dynamic brake | built-in | ||
| Control mode | ① Position control, ② speed control, ③ torque control, ④ position/speed control, ⑤ position/torque co ntrol, ⑥ speed/torque control; Six control modes can be switched according to parameters | ||
| Universal | Auto-adjust | In the motor drive state,the load inertia is inferred and determined in real time byy the action instructions from th upper level and those issued bythe installation and debugging software Master,and the gain corresponding to the rigidity seting is automaticllyset | |
| Frequency division function offeedbackpulse | The number of pulses can be set arbitrarily(not exceeding the number of feedback pulses from the encoder). | ||
| Protective function | hardware eror | Overvoltage,undervoltage,overspeed,overload,overcurrent,encoder abnomality,etc | |
| Software bug | Excessive position deviation,frequency division of command pulses,abnormal EEPROM,etc | ||
| Alarm data tracking function | The historical records of the alarm data can be referred to | ||
| Unlimited selection of absolute functions | The function of setting the upper limit value of multi-turn data of the absolute value encoder can be achieved | ||
| Position control | Pulse input | The maximum number of command pulse frequencies | 500K pulse/s(optocoupler input);4M pulse/s(differential input) |
| Input the form ofthe puse signal | Optocoupler input or differential input,and the input type and form can be selected according to the parameters(①forward direction/reverse direction,②A phase /B phase,③command+direction) | ||
| smoothing filter | For instruction input,a one-time delay filter or an FIR type filter can be selected | ||
| Analog input | Torque limit command input | Torque limits in each direction can be set separately | |
| Torque feed forward input | Torque feedforward can be input based on the analog voltage | ||
| Vibration Control | Up to 4 can be used simultaneously | ||
| V-type damping filter | Up to 1 can be used simultaneously | ||
| 2degrees of freedom | available | ||
| Load fluctuation suppression control | available | ||
| Position comparison output function | available | ||
| Speed control | Control input | Internal instruction speed selection:1.Internal instruction speed selection,2.Internal instruction speed selection,3.Zero speed damping,etc | |
| Control output | Speed arrival,etc. | ||
| Analog input | Speed command input | The input speed can be adjusted according to the analog voltage | |
| Torque Iimit command input | Torque limits in each direction can be set separately | ||
| Torque feedforward input | Torque feedforward can be input based on the analog voltage | ||
| nternal speed command | Eight internal speeds can be switched according to the control input | ||
| Soft-start/power-down function | 0 to 10 seconds per 1000r/min.Acceleration and deceleration are set separately | ||
| Zero speed clamp | According to the zero-speed clamping input,the internal speed command can be fixed to 0 | ||
| 2 degrees of freedom | available | ||
| Load fluctuation suppression control | available | ||
| Position comparison outputfunction | unavailable | ||
| Torque control | Control input | Zero-speed clamping,torque command symbolinput,etc | |
| Control output | Speed arrival,etc. | ||
| Analog input | Torque command input | Torque instructions can be input based on the analog voltage | |
| 2 degrees of freedom | unavailable | ||
| Load fluctuation suppression control | unavailable | ||
| Position comparison outputfunction | unavailable | ||
Application
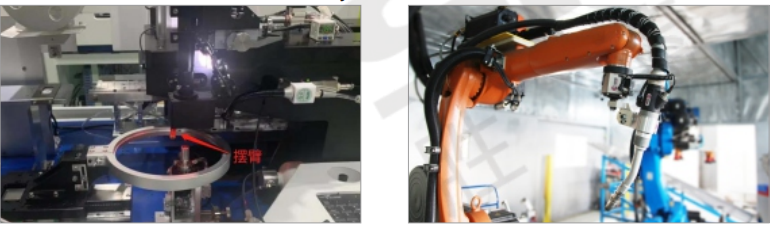
Applications in the semiconductor industry
Applications on mechanical arms
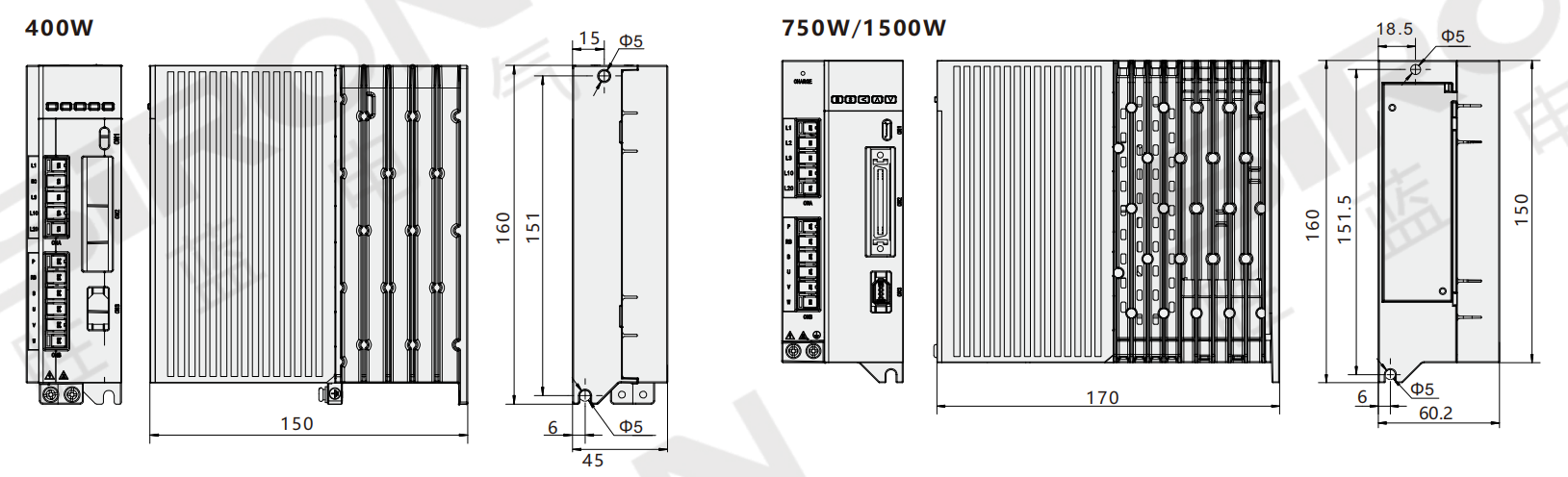
Dimension
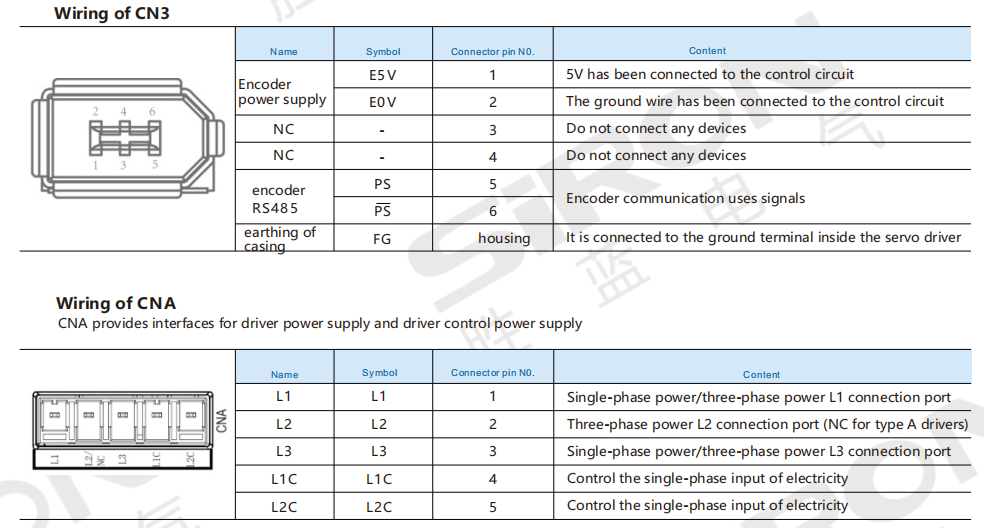
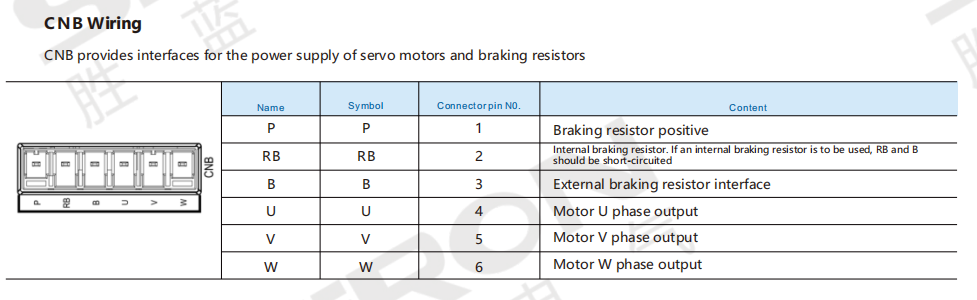
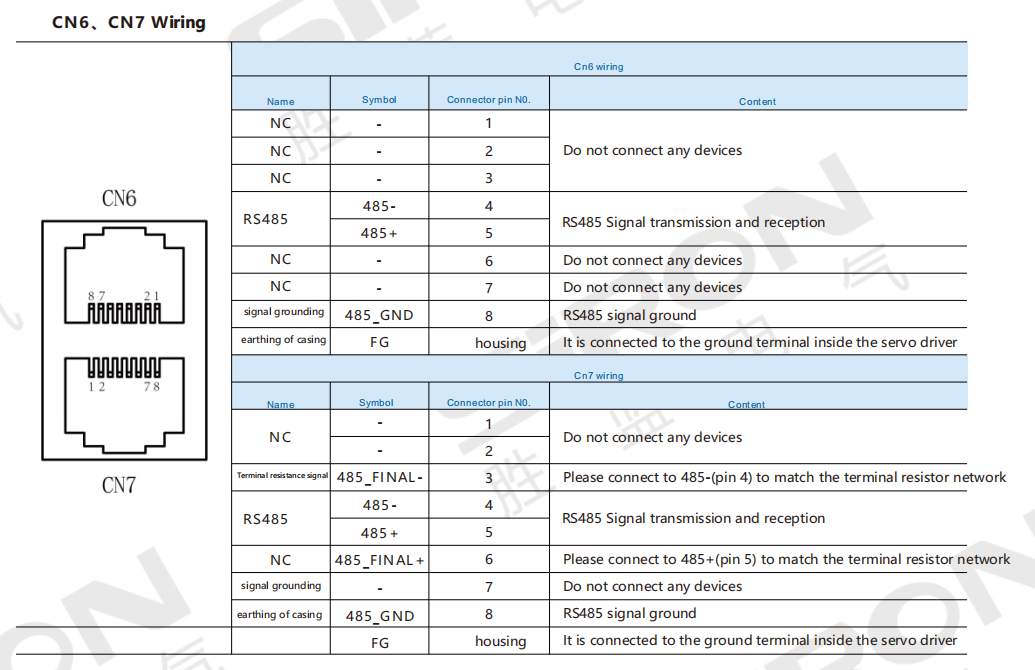
Wiring diagram
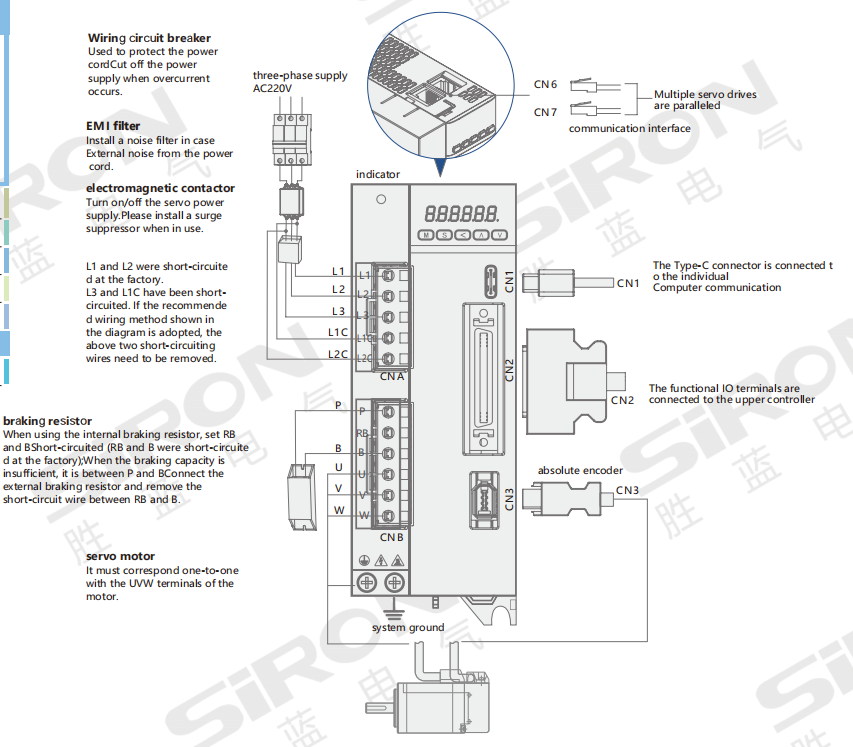
Definition of Servo System Terminals