
Please Choose Your Language
ปิด
เลือกเว็บไซต์ของคุณ
ทั่วโลก
โซเชียลมีเดีย



| จำนวน: | |
|---|---|
|
ส่งออก PDF |
|








เอ็ม215
ไซรอน
8503009090
เกี่ยวกับการเลือก

ตัวอย่างการเลือก: M215-AS04BB หมายถึงไดรเวอร์เซอร์โวซีรีส์ M215 โดยมีแรงดันไฟฟ้าของแหล่งจ่ายไฟ AC220V, โหมดเอาต์พุตแกนเดียว, กำลัง 400W, ประเภทการควบคุมของประเภทพื้นฐาน และประเภทตัวเข้ารหัสของประเภทการสื่อสารแบบอนุกรม
หมายเหตุ: 1. ประเภทการควบคุมเป็นประเภทพื้นฐาน ประเภทพื้นฐานประกอบด้วยฟังก์ชันต่างๆ เช่น การสื่อสาร USB, Modbus และอินพุตพัลส์คำสั่ง 2. แรงดันไฟฟ้าของแหล่งจ่ายไฟ AC220V: ช่วงพลังงานที่เลือกได้คือ 400 ถึง 2000W ไดรเวอร์เซอร์โวซีรีส์ M215 สามารถจับคู่กับเซอร์โวมอเตอร์ซีรีส์ M205 ได้
ตารางที่ 1: พลังงาน
| รหัส | 04 | 08 | 15 | 22 | 30 |
| พลัง | 400W | 750W | 1500W | 2200วัตต์ | 3000W |
| จัดอันดับปัจจุบัน | 2.8A |
5เอ |
6เอ | 8.4ก | 12.5A |
ข้อมูลจำเพาะ
| ชื่อ | M215series เซอร์โวไดรฟ์ | ||
| กำลังไฟฟ้าเข้า | แหล่งจ่ายไฟวงจรหลัก | ไฟฟ้ากระแสสลับสามเฟส220~240V(-15~+10%,50~60Hz) | |
| อำนาจการควบคุม | AC เฟสเดียว220~240V(-15~+10%,50~60Hz) | ||
| จัดอันดับปัจจุบัน | 0.4kW/2.8A,0.75kW/5.0A,1.0kW/6.0A,1.5kW/8.4A | ||
| ข้อเสนอแนะของตัวเข้ารหัส | ห้องต่อสายดินหนึ่งห้องในเวลา ACT500V สามารถทนต่อแรงดันไฟฟ้าเป็นเวลา 1 นาที ( กระแสไฟรั่ว 20mA) (200Vseries) |
||
| ข้อเสนอแนะของตัวเข้ารหัส | รหัสแรก | ตัวเข้ารหัสแบบเพิ่มหน่วย 10,000 บรรทัด 17 บิต ค่าสัมบูรณ์ 23 บิต | |
| เงื่อนไขการใช้งาน | ใช้อุณหภูมิโดยรอบ | -5~+45°℃(ไม่มีการแช่แข็ง) | |
| บันทึกอุณหภูมิโดยรอบ | -20~+85℃ | ||
| การใช้/การเก็บรักษาความชื้น | ต่ำกว่า 95% RH (ไม่มีการแช่แข็งหรือควบแน่น) | ||
| ความต้านทานการสั่นสะเทือน | ต่ำกว่า 5.88 ม./วินาที 2.10 ถึง 60Hz (ไม่สามารถใช้ที่ความถี่เรโซแนนซ์อย่างต่อเนื่องได้) | ||
| แรงกระแทก | 19.6 เมตร/วินาที⊃2; | ||
| ระดับความสูง | สามารถใช้งานได้ตามปกติในระยะทางต่ำกว่า 1,000 ม. สำหรับระยะทางระหว่าง 1,000 ถึง 2,000 ม. โปรดใช้โดยมีความจุลดลง |
||
| ขั้วต่ออินเทอร์เฟซ IO | สัญญาณดิจิตอล | ป้อน เอาต์พุต |
มีช่องอินพุตสากล 7 ช่อง เลือกกำลังของอินพุตสากลตามพารามิเตอร์ |
| มีช่องอินพุตสากล 4 ช่อง เลือกฟังก์ชันของเอาต์พุตสากลตามพารามิเตอร์ | |||
| สัญญาณอนาล็อก | เข้า | A/D 12 บิต 2 ช่อง, ±10V | |
| สัญญาณพัลส์ | เข้า | 2 อินพุต; อินพุตส่วนต่างสูงสุดคือ 4Mpps และความกว้างพัลส์ต้องไม่น้อยกว่า 0.125us อินพุตของ ออปโตคัปเปลอร์คือ 500Kpps ที่ใหญ่ที่สุดโดยมีความกว้างพัลส์ไม่น้อยกว่า 1us (รองรับอินพุต 5V และอินพุต 24V ตามลำดับ) |
|
| เอาท์พุต | 4 เอาท์พุท; เอาท์พุตดิฟเฟอเรนเชียลเฟสของ A, B และ Z; เอาต์พุตวงจรเปิดที่ตัวสะสมของเฟส Z | ||
| ฟังก์ชั่นการสื่อสาร | ยูเอสบี (ประเภท-C) | สามารถเชื่อมต่อกับคอมพิวเตอร์เพื่อตั้งค่าพารามิเตอร์ ตรวจสอบสถานะ ฯลฯ | |
| โมดบัส | การสื่อสาร 1:n สำหรับ PLC รองรับโหมด Modbus-RTU และ ASCII โดยมีอัตรารับส่งข้อมูลตั้งแต่ 400bps ถึง 230400bps ที่สามารถตั้งค่าได้ | ||
| แผงด้านหน้า | ปุ่มตัวเลข 5 หลักและจอแสดงผล LED 6 หลัก | ||
| ตัวต้านทานเบรก | ตัวต้านทานเบรกในตัว (มีชนิดภายนอกให้เลือกด้วย) | ||
| เบรกแบบไดนามิก | ในตัว | ||
| โหมดควบคุม | 1 การควบคุมตำแหน่ง 2 การควบคุมความเร็ว 3 การควบคุมแรงบิด ④ การควบคุมตำแหน่ง/ความเร็ว ⑤ การควบคุมตำแหน่ง/แรงบิด ⑥ การควบคุมความเร็ว/แรงบิด สามารถเปลี่ยนโหมดควบคุมได้หกโหมดตามพารามิเตอร์ |
||
| สากล | ปรับอัตโนมัติ | ในสถานะของมอเตอร์ไดรฟ์ ความเฉื่อยของโหลดจะถูกอนุมานและกำหนดแบบเรียลไทม์โดยคำแนะนำการดำเนินการจากระดับบนและคำแนะนำที่ออกโดยการติดตั้งและการดีบักซอฟต์แวร์ Master และอัตราขยายที่สอดคล้องกับการตั้งค่าความแข็งแกร่งจะถูกตั้งค่า โดยอัตโนมัติ |
|
| ฟังก์ชั่นการแบ่งความถี่ offbackpulse | สามารถตั้งค่าจำนวนพัลส์ได้ตามต้องการ (ไม่เกินจำนวนพัลส์ป้อนกลับจากตัวเข้ารหัส) | ||
| ฟังก์ชั่นป้องกัน | ข้อผิดพลาดของฮาร์ดแวร์ | แรงดันไฟฟ้าเกิน, แรงดันตก, ความเร็วเกิน, โอเวอร์โหลด, กระแสเกิน, ความผิดปกติของตัวเข้ารหัส ฯลฯ | |
| ข้อบกพร่องของซอฟต์แวร์ | การเบี่ยงเบนตำแหน่งที่มากเกินไป, การแบ่งความถี่ของพัลส์คำสั่ง, EEPROM ผิดปกติ ฯลฯ | ||
| ฟังก์ชั่นการติดตามข้อมูลการเตือน | สามารถอ้างอิงบันทึกประวัติของข้อมูลการเตือนได้ | ||
| การเลือกฟังก์ชันสัมบูรณ์ได้ไม่จำกัด | ฟังก์ชั่นการตั้งค่าขีดจำกัดบนของข้อมูลหลายรอบของตัวเข้ารหัสค่าสัมบูรณ์สามารถทำได้ | ||
| การควบคุมตำแหน่ง | อินพุตพัลส์ | จำนวน ความถี่พัลส์คำสั่ง สูงสุด |
500K พัลส์/วินาที (อินพุตออปโตคัปเปลอร์); 4M พัลส์/วินาที (อินพุตส่วนต่าง) |
| ป้อนข้อมูลในรูปแบบของ puse สัญญาณ |
อินพุตออปโตคัปเปลอร์หรืออินพุตดิฟเฟอเรนเชียล และประเภทอินพุตและรูปแบบสามารถเลือกได้ตามพารามิเตอร์ (ทิศทางไปข้างหน้า/ทิศทางย้อนกลับ เฟส A /เฟส B คำสั่ง 3 ขั้นตอน + ทิศทาง) | ||
| ตัวกรองที่เรียบ | สำหรับการป้อนข้อมูลคำสั่ง สามารถเลือกตัวกรองการหน่วงเวลาครั้งเดียวหรือตัวกรองประเภท FIR ได้ | ||
| อินพุตแบบอะนาล็อก | จำกัดแรงบิด อินพุตคำสั่ง |
ขีดจำกัดแรงบิดในแต่ละทิศทางสามารถตั้งค่าแยกกันได้ | |
| ป้อนแรงบิด ไปข้างหน้า อินพุต |
สามารถป้อนแรงบิดป้อนไปข้างหน้าตามแรงดันไฟฟ้าแบบอะนาล็อก | ||
| การควบคุมการสั่นสะเทือน | สามารถใช้งานได้ถึง 4 เครื่องพร้อมกัน | ||
| ตัวกรองการทำให้หมาด ๆ ชนิด V | สามารถใช้งานได้ถึง 1 เครื่องพร้อมกัน | ||
| 2 องศาแห่งอิสรภาพ | มีอยู่ | ||
| การควบคุมการปราบปรามการผันผวนของโหลด | มีอยู่ | ||
| ฟังก์ชันเอาต์พุตการเปรียบเทียบตำแหน่ง | มีอยู่ | ||
| การควบคุมความเร็ว | อินพุตควบคุม | การเลือกความเร็วคำสั่งภายใน: 1. การเลือกความเร็วคำสั่งภายใน, 2. การเลือกความเร็วคำสั่งภายใน, 3. ลดความเร็วเป็นศูนย์ ฯลฯ | |
| เอาต์พุตควบคุม | มาถึงความเร็ว ฯลฯ | ||
| อินพุตแบบอะนาล็อก | คำสั่งความเร็ว อินพุต |
ความเร็วอินพุตสามารถปรับได้ตามแรงดันไฟฟ้าแบบอะนาล็อก | |
| Torque Iimit อินพุตคำสั่ง |
ขีดจำกัดแรงบิดในแต่ละทิศทางสามารถตั้งค่าแยกกันได้ | ||
| อินพุตป้อนแรงบิดไปข้างหน้า | สามารถป้อนแรงบิดป้อนไปข้างหน้าตามแรงดันไฟฟ้าแบบอะนาล็อก | ||
| คำสั่งความเร็วภายใน | ความเร็วภายในแปดระดับสามารถเปลี่ยนได้ตามอินพุตควบคุม | ||
| ฟังก์ชั่นเริ่มอ่อน/ปิดเครื่อง | 0 ถึง 10 วินาทีต่อ 1,000 รอบ/นาที การเร่งความเร็วและการชะลอตัวตั้งค่าแยกกัน | ||
| แคลมป์ความเร็วเป็นศูนย์ | ตามอินพุตการหนีบความเร็วเป็นศูนย์คำสั่งความเร็วภายในสามารถแก้ไขได้ที่ 0 | ||
| อิสระ 2 องศา | มีอยู่ | ||
| การควบคุมการปราบปรามการผันผวนของโหลด | มีอยู่ | ||
| ฟังก์ชั่นเอาต์พุตการเปรียบเทียบตำแหน่ง | ไม่พร้อมใช้งาน | ||
| การควบคุมแรงบิด | อินพุตควบคุม | การหนีบด้วยความเร็วเป็นศูนย์, อินพุตสัญลักษณ์คำสั่งแรงบิด ฯลฯ |
|
| เอาต์พุตควบคุม | มาถึงความเร็ว ฯลฯ | ||
| อินพุตแบบอะนาล็อก | แรงบิด อินพุตคำสั่ง |
คำแนะนำแรงบิดสามารถป้อนตามแรงดันไฟฟ้าแบบอะนาล็อก | |
| อิสระ 2 องศา | ไม่พร้อมใช้งาน | ||
| การควบคุมการปราบปรามการผันผวนของโหลด | ไม่พร้อมใช้งาน | ||
| ฟังก์ชั่นเอาต์พุตการเปรียบเทียบตำแหน่ง | ไม่พร้อมใช้งาน |
||
แอปพลิเคชัน
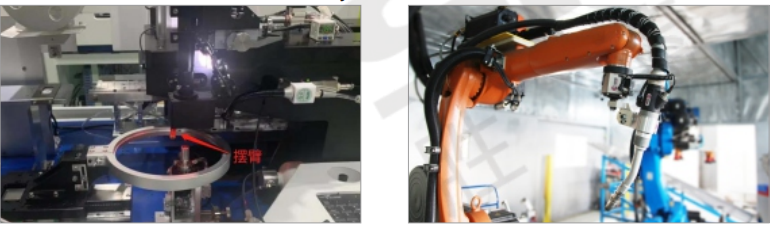
การใช้งานในอุตสาหกรรมเซมิคอนดักเตอร์
การใช้งานกับแขนกล







