Sobre a seleção
300.000 pixels 1,3 megapixels
| Modelo |
Descrição de desempenho |
|
Modelo |
Descrição de desempenho |
| K516-1-A1 |
Lente de 4,7 mm, colorida |
K516-1-B1 |
Lente 8mm, Monocromática |
| K516-1-A2 |
Lente 8mm, colorida |
K516-1-B2 |
Lente 16mm, Monocromática |
| K516-1-A3 |
Lente 16mm, colorida |
|
|
Acessórios

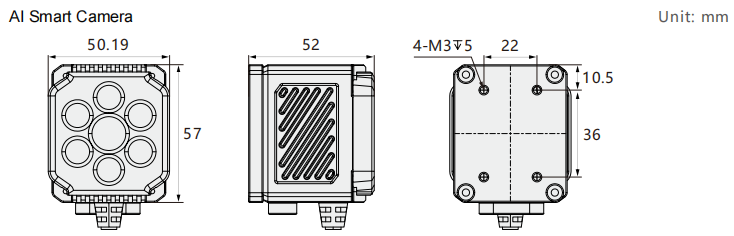
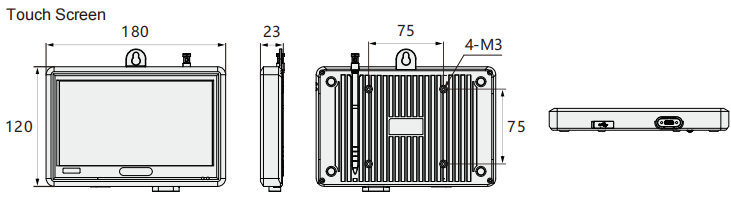
Dimensão
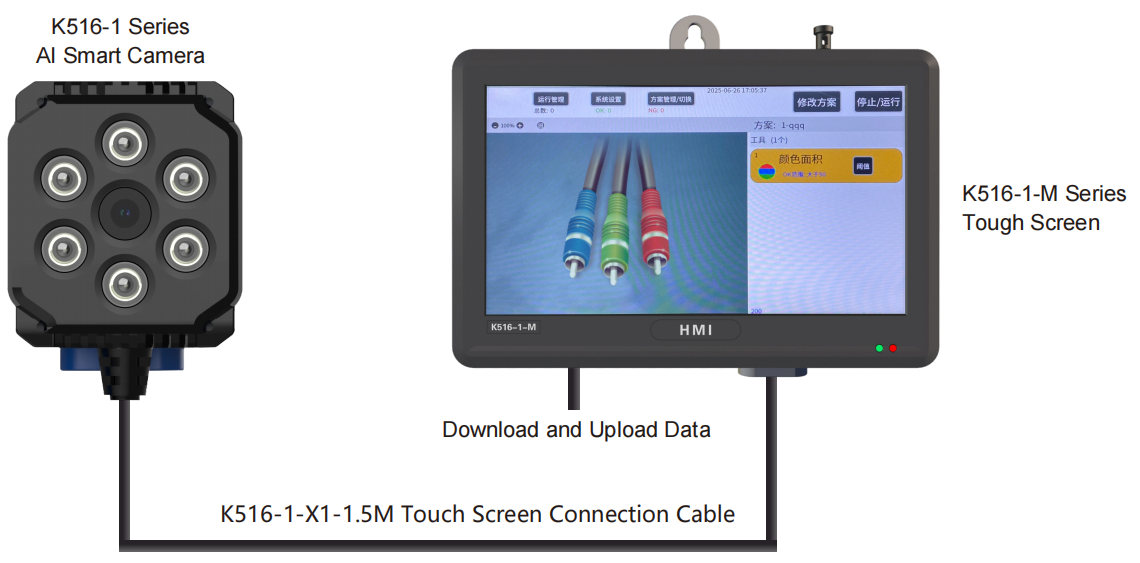
Descrição do cabo de alimentação e IO 8P
| Descrição da interface de sinal |
| Pino nº. |
Cor |
Nome |
Descrição |
| Pino 1 |
Vermelho |
DC24 |
Fonte de alimentação positiva |
| Pino 2 |
Preto |
0V/COM |
Fonte de alimentação negativa / terminal comum de E/S |
| Pino 3 |
Verde |
IN1 |
Entrada do disparador da câmera |
| Pino 4 |
Laranja |
SAÍDA1 |
Saída 1 |
| Pino 5 |
Amarelo |
SAÍDA2 |
Saída 2 |
| Pino 6 |
Marrom |
SAÍDA3 |
Saída 3 |
| Pino 7 |
Azul |
RS232RXD |
Receber dados |
| Pino 8 |
Cinza |
RS232_TXD |
Transmitir dados |
Especificações (câmera inteligente AI)
| Modelo |
K516-1-A1 |
K516-1-A2 |
K516-1-A3 |
K516-1-B1 |
K516-1-B2 |
| Resolução |
640x⁴80 |
1280x960 |
| Pixel |
300.000 pixels |
1,3 megapixels |
| Taxa máxima de quadros |
60 fps |
60 fps |
| Lente |
4,7 mm |
8mm |
16mm |
8mm |
16mm |
| Tamanho dos pixels |
3,744x3,744 |
3,744x3,744 |
3,744x3,744 |
3,744x3,744 |
3,744x3,744 |
| Reconhecimento de imagem |
Cor |
Cor |
Cor |
Monocromático |
Monocromático |
| Arquitetura do sistema |
Processador quad-core ARM de 2 GHz |
| Memória |
2GB DDR4 |
| Armazenar |
EMMC de 32 GB |
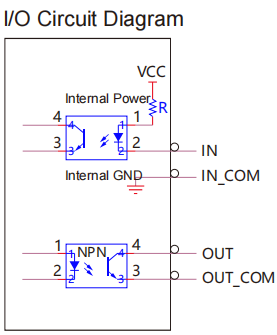
| E/S digitais |
Interface de E/S digital; Entrada GPI opto-isolada de 1 canal, saída GPO opto-isolada de 3 canais, porta serial RS232 de 1 canal |
| Saída de vídeo |
Interface LVDS |
| USB |
USB2.0 de 1 canal |
| Fonte de energia |
CC 24V |
| Consumo de energia |
12W |
| Interface de lente |
Foco Mecânico M12 |
| Fonte de luz |
Fonte de luz branca |
| Indicador LED |
Ligar / Executar / Gatilho / OK / NG |
| Função de algoritmo |
Algoritmo de visão integrado com aprendizagem Modelo A; suporta detecção de direção direta/reversa, presença/ausência, dimensão, posição e reconhecimento de cores |
| Material de habitação |
Liga de alumínio |
| Grau de proteção |
IP67 |
| Temperatura ambiente |
0-50℃ |
| Umidade ambiental |
2 0% ~ 9 5% PH Sem condensação |
| Comprimento padrão do cabo de alimentação e E/S |
3m |
Parâmetros de especificação (painel de toque)
| Modelo |
K516-1-M |
| Tamanho do painel |
7 polegadas |
| Resolução |
1024X600 |
| Luz indicadora |
Lâmpada PWR / Touch Display |
| Interface |
LVDS/USB |
| Modo de toque |
Resistivo |
| Volagem |
CC 12V |
| Poder |
5W |
| Grau de proteção |
IP40 |
| Temperatura ambiente |
0~50℃ |
| Umidade ambiental |
20%~95% RH, sem condensação |
| Tamanho de abertura |
260,2 mm x 179,8 mm |
| Peso |
450g |
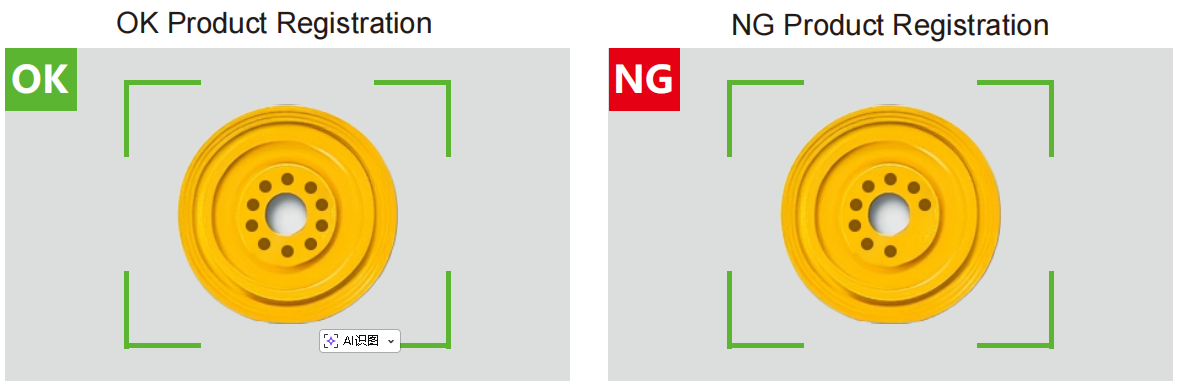
Referência de registro
Cadastre apenas produtos OK e produtos NG, e o sistema pode se ajustar automaticamente às configurações ideais. Mesmo que haja alterações nas peças de trabalho e no ambiente, você só precisa registrar adicionalmente novas peças de trabalho. O sistema adicionará automaticamente condições de detecção, sem configurações complicadas ou ajustes de instalação.
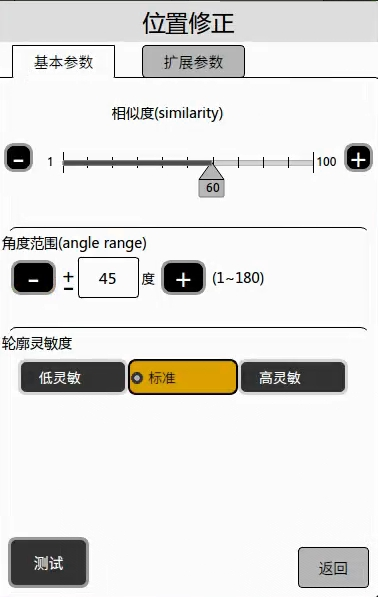
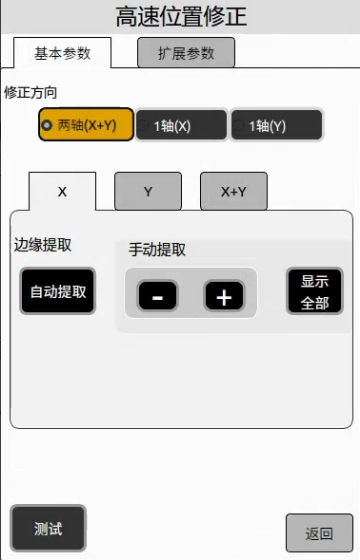
Correção de Posição: Corrija a posição do produto por correspondência de contorno. Correção de posição de alta velocidade: corrija o produto nas direções X e Y procurando por recursos alvo em preto e branco.
Detalhes do produto



Desenho de Estrutura
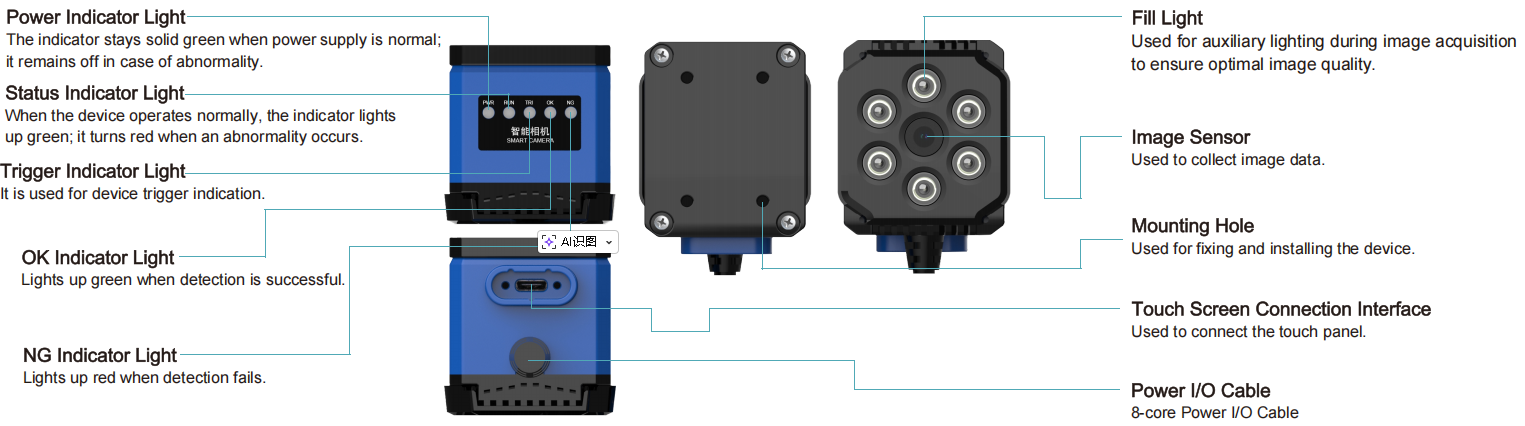
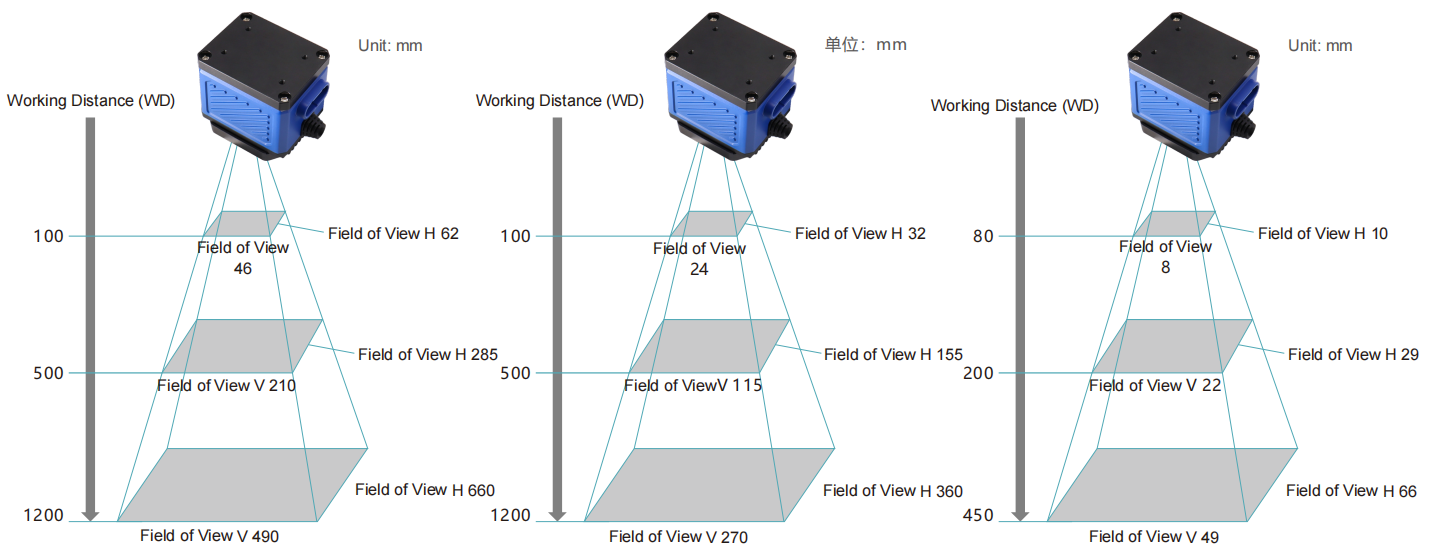
Diagrama de características do intervalo de detecção
| Modelo |
Distância de montagem |
Campo de VisãoH |
Campo de visão V |
K516-1-A1
Tipo de amplo campo de visão |
30 |
25 |
19 |
| 100 |
62 |
46 |
| 200 |
118 |
90 |
| 300 |
170 |
130 |
| 500 |
285 |
210 |
| 1200 |
660 |
490 |
| Modelo |
Distância de montagem |
Campo de VisãoH |
Campo de visão V |
K516-1-A2
Tipo padrão |
40 |
14 |
11 |
| 100 |
32 |
24 |
| 200 |
63 |
47 |
| 300 |
93 |
69 |
| 500 |
155 |
115 |
| 1200 |
360 |
270 |
| Modelo |
Distância de montagem |
Campo de VisãoH |
Campo de visão V |
K516-1-A3
Tipo padrão |
80 |
10 |
8 |
| 100 |
13 |
10 |
| 150 |
21 |
16 |
| 200 |
29 |
22 |
| 300 |
43 |
32 |
| 450 |
66 |
49 |
| Modelo |
Distância de trabalho |
Campo de visão H |
Campo de visão V |
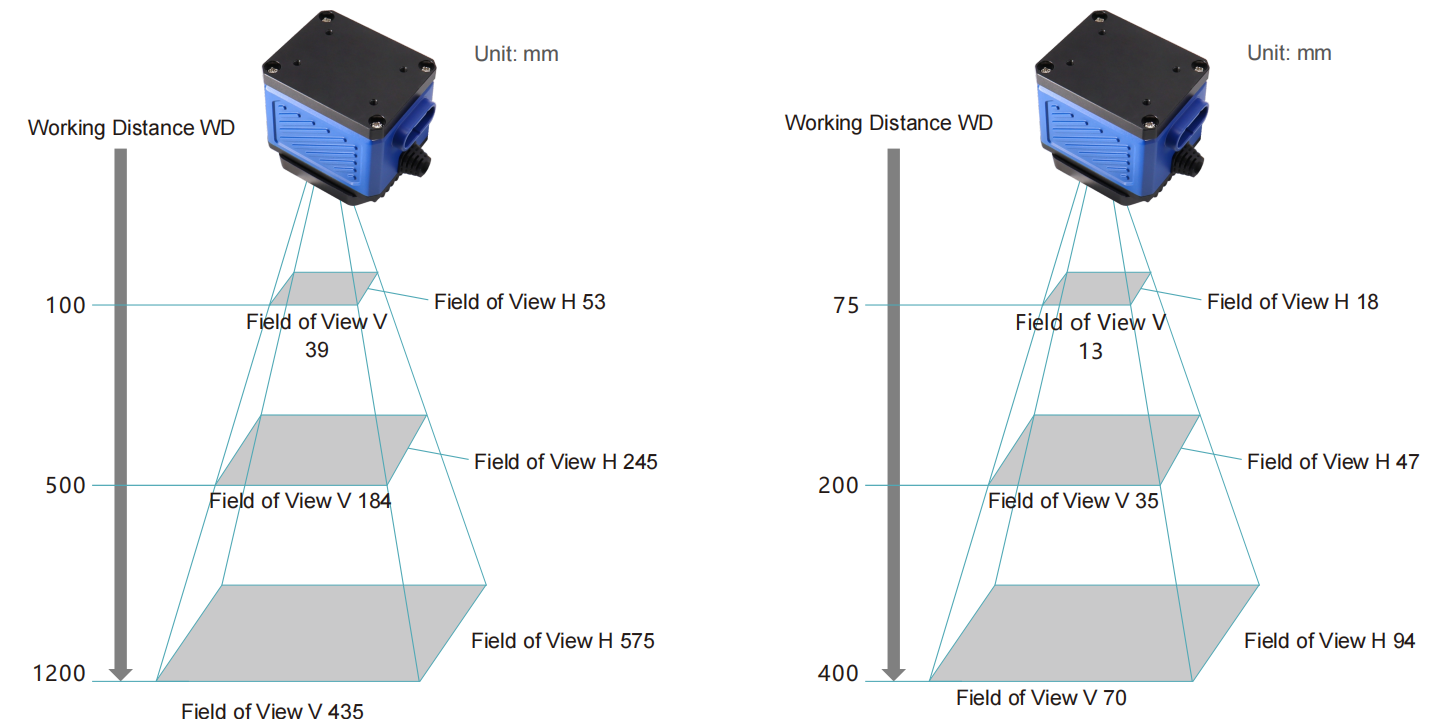
K516-1-B1
Tipo padrão |
30 |
18 |
14 |
| 100 |
53 |
39 |
| 200 |
101 |
75 |
| 300 |
150 |
112 |
| 500 |
245 |
184 |
| 1200 |
575 |
435 |
| Modelo |
Distância de trabalho |
Campo de visão H |
Campo de visão V |
K516-1-B2
Tipo padrão |
75 |
18 |
13 |
| 100 |
23 |
18 |
| 150 |
35 |
26 |
| 200 |
47 |
35 |
| 300 |
71 |
53 |
| 400 |
94 |
70 |
Ferramenta de detecção de algoritmo
Modo Padrão: Equipado com uma variedade de ferramentas de detecção para atender facilmente a vários requisitos de aplicação.
Área em tons de cinza correspondente ao contorno


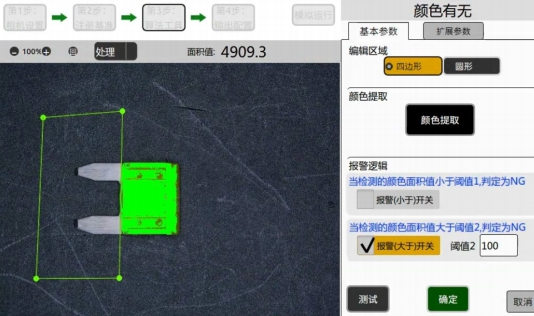
Medição da largura da área colorida

Presença/ausência de recurso de aprendizagem de modelo

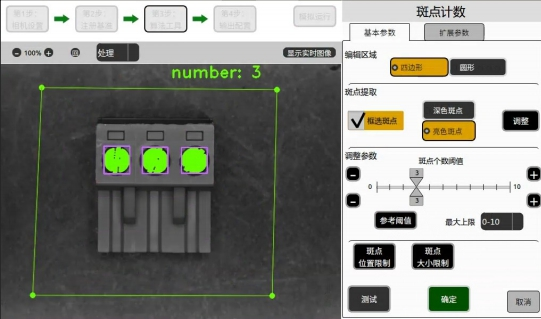
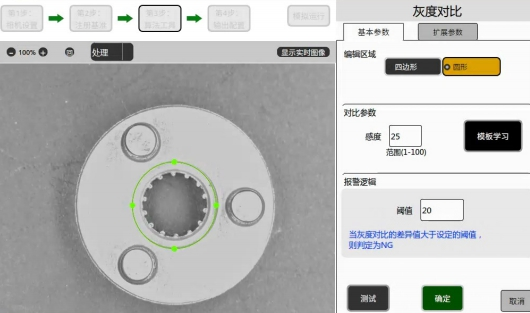
Comparação de escala de cinza de contagem de blob
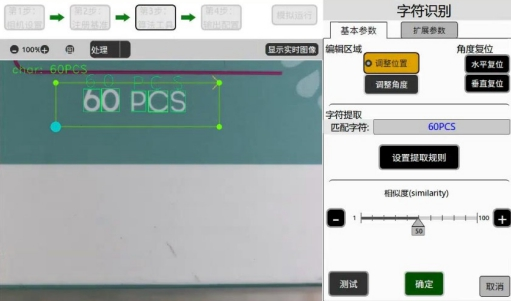
Reconhecimento de caracteres de presença/ausência de cores (OCR)
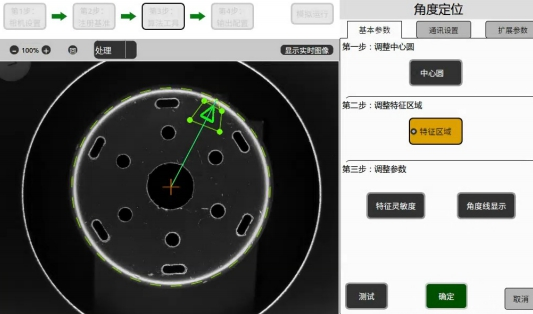
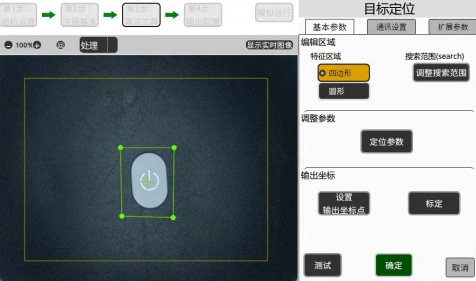
Posicionamento em Ângulo Posicionamento Alvo
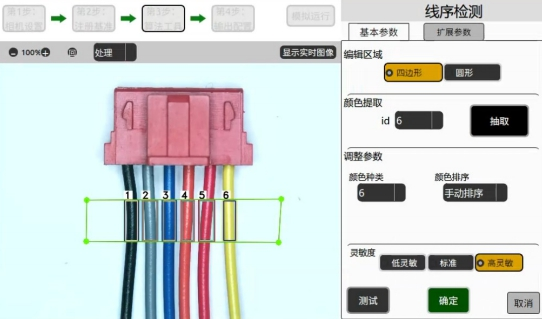
Aprendizagem de IA de inspeção de sequência de fio de passo

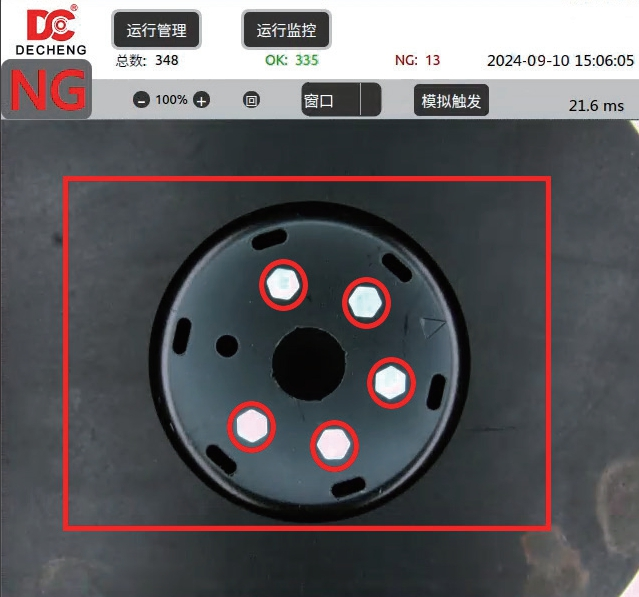
Casos de aplicação
Correspondência de contorno: identifique pela diferença de formato
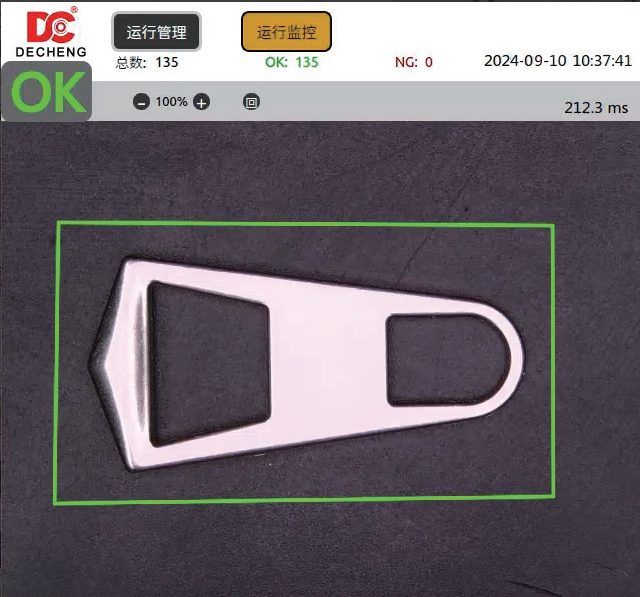
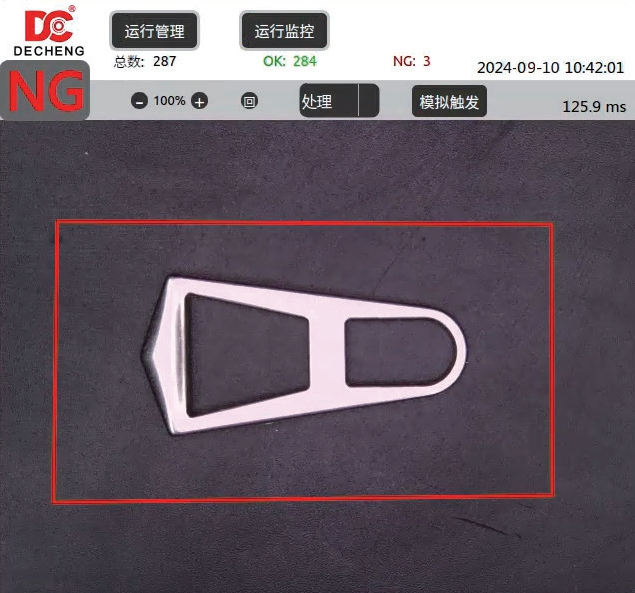
Basta incluir o alvo para extrair automaticamente o contorno. Ele pode lidar com flutuações de brilho e diferenças individuais nas condições de superfície que são difíceis para métodos de correlação normalizados.
Área de cores: identifique pelo tamanho da área de cores

Com base na área de cores registrada dos produtos qualificados, é calculada a consistência com o alvo detectado. Basta clicar na cor alvo na imagem para concluir a extração de cores com fácil operação.
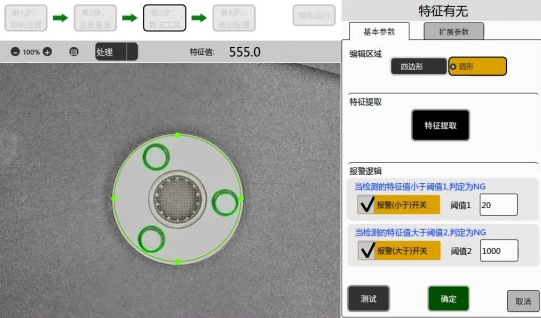
Presença/ausência de recurso: identifique pela contagem de pixels da borda

Ele pode identificar alvos com formas não fixas ou diferenças nas condições da superfície. Borda refere-se aos pontos limites das mudanças claras e escuras.
Área em escala de cinza: identificação por nível de brilho especificado


Tome a área de brilho dos produtos bons registrados como referência para calcular a consistência com o alvo de detecção. É adequado para identificação com base na diferença de brilho e diferença de processamento de superfície.
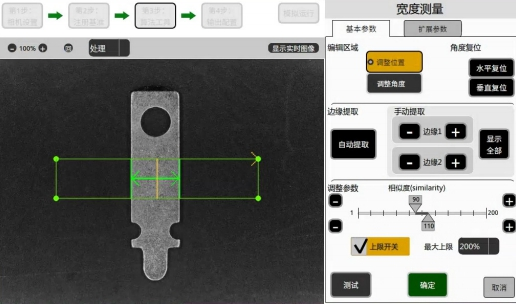
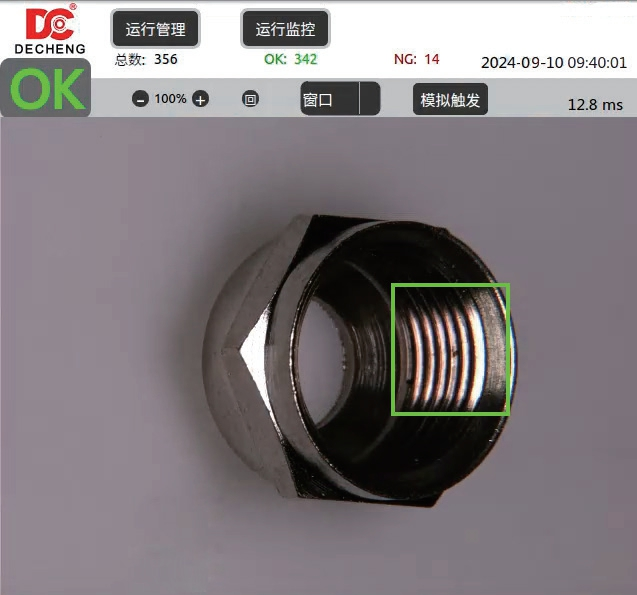
Medição de Largura: Identificação pela largura entre bordas
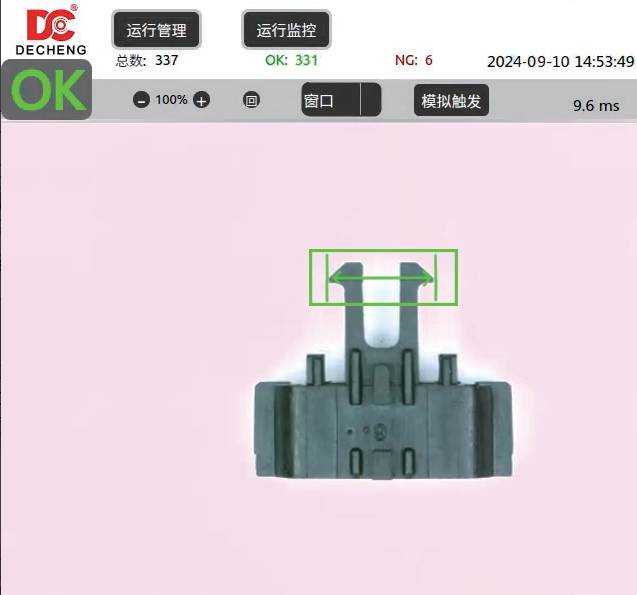
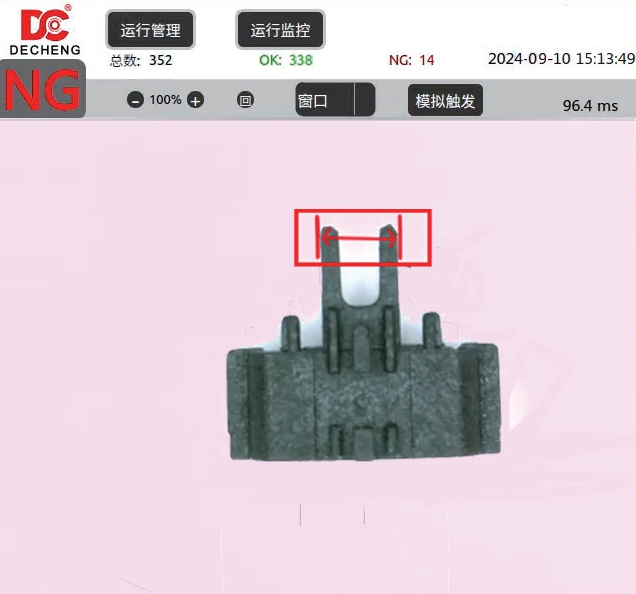
Ele pode detectar empenamento ou largura do objeto alvo. A dimensão real pode ser exibida usando a função de escala.
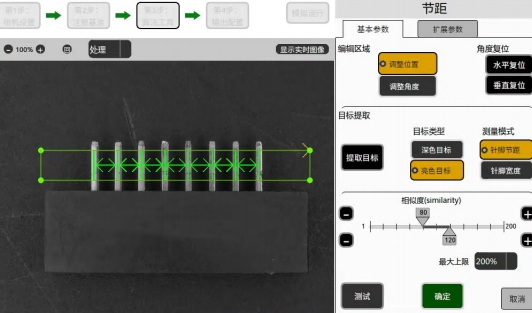
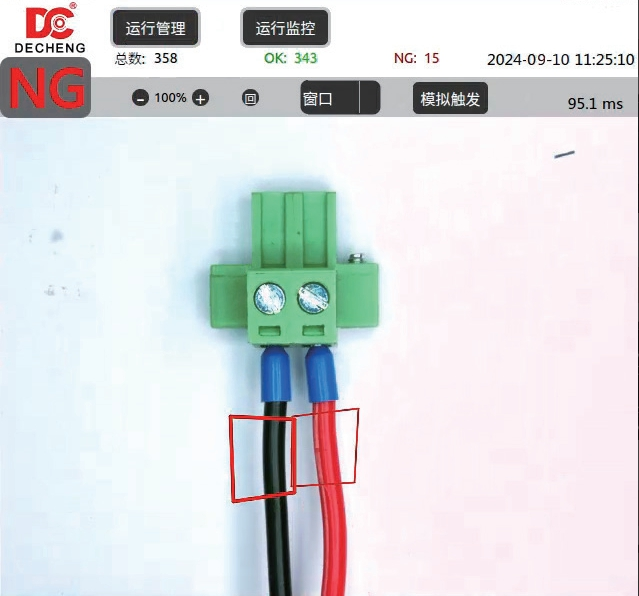
Tom: Identificação por diferença de tom
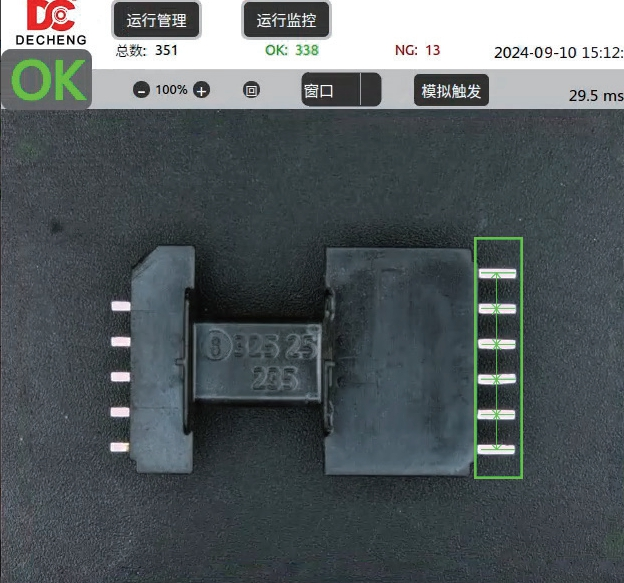
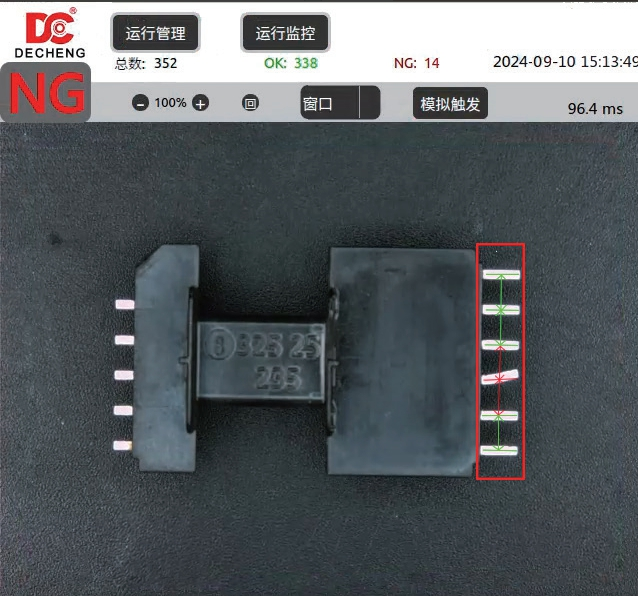
Ele pode detectar não apenas o tom, mas também a largura do pino. A dimensão real pode ser exibida usando a função de escala.
Posicionamento de ângulo: Identifique por desalinhamento angular e deslocamento


Ele pode identificar o desalinhamento angular e o deslocamento do alvo dentro do intervalo especificado.
Contagem de blobs: identifique pelo número de blobs no alvo

Com base na quantidade de blobs registrados de produtos qualificados, ele verifica se o número de blobs do alvo detectado é consistente.
Reconhecimento de caracteres: identifique por diferenças em caracteres, números e datas
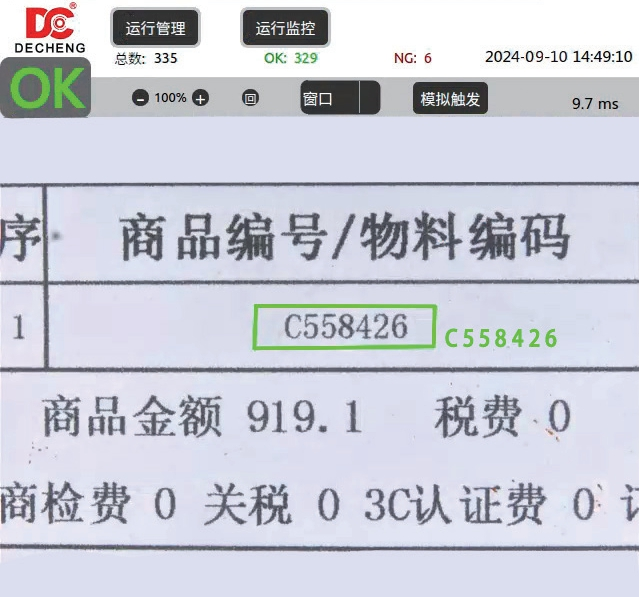

Com base nas informações de caracteres e datas registradas de produtos qualificados, verifica se os caracteres e as datas do alvo detectado são consistentes.
Instalação do dispositivo
Fixe o dispositivo com parafusos M3 através do suporte de montagem e outras peças mecânicas. Suporta instalação vertical e horizontal, e o método de montagem pode ser selecionado de acordo com cenários reais de aplicação.
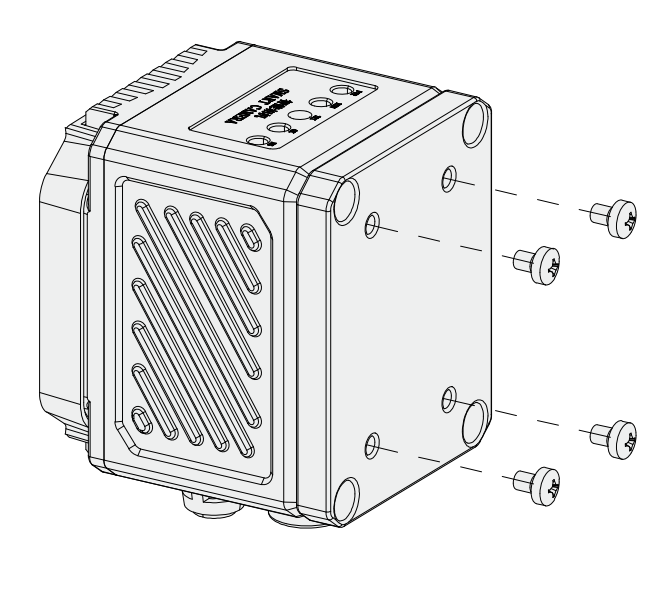
Diagrama esquemático de conexão