O selekcji
300 000 pikseli 1,3 megapiksela
| Model |
Opis wykonania |
|
Model |
Opis wykonania |
| K516-1-A1 |
Obiektyw 4,7 mm, kolor |
K516-1-B1 |
Obiektyw 8 mm, monochromatyczny |
| K516-1-A2 |
Soczewka 8 mm, kolor |
K516-1-B2 |
Obiektyw 16 mm, monochromatyczny |
| K516-1-A3 |
Obiektyw 16 mm, kolor |
|
|
Akcesoria

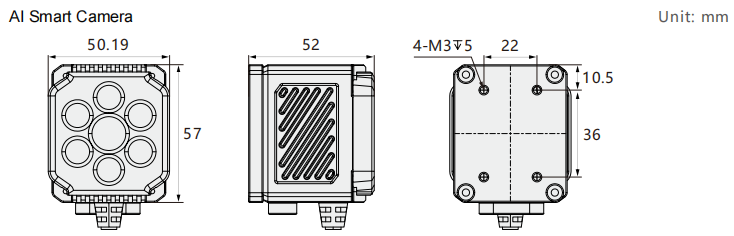
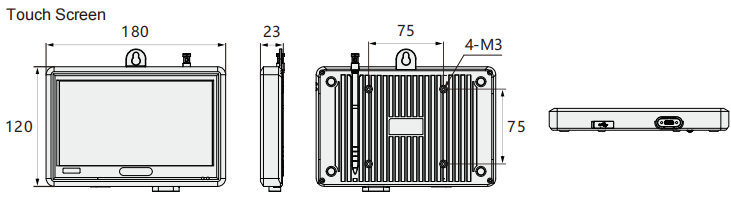
Wymiar
Opis kabla zasilania i wejścia/wyjścia 8P
| Opis interfejsu sygnałowego |
| Nr pinu |
Kolor |
Nazwa |
Opis |
| Przypnij 1 |
Czerwony |
DC24 |
Dodatnie zasilanie |
| Przypnij 2 |
Czarny |
0 V/COM |
Ujemny zacisk zasilania/wspólnego wejścia/wyjścia |
| Przypnij 3 |
Zielony |
W1 |
Wejście wyzwalacza kamery |
| Przypnij 4 |
Pomarańczowy |
WYJŚCIE1 |
Wyjście 1 |
| Przypnij 5 |
Żółty |
WYJ2 |
Wyjście 2 |
| Przypnij 6 |
Brązowy |
WYJ3 |
Wyjście 3 |
| Przypnij 7 |
Niebieski |
RS232RXD |
Odbierz dane |
| Przypnij 8 |
Szary |
RS232_TXD |
Przesyłaj dane |
Dane techniczne (inteligentny aparat AI)
| Model |
K516-1-A1 |
K516-1-A2 |
K516-1-A3 |
K516-1-B1 |
K516-1-B2 |
| Rezolucja |
640x⁴80 |
1280x960 |
| Piksel |
300 000 pikseli |
1,3 megapiksela |
| Maksymalna liczba klatek na sekundę |
60 klatek na sekundę |
60 klatek na sekundę |
| Obiektyw |
4,7 mm |
8mm |
16mm |
8mm |
16mm |
| Rozmiar piksela |
3,744 x 3,744 |
3,744 x 3,744 |
3,744 x 3,744 |
3,744 x 3,744 |
3,744 x 3,744 |
| Rozpoznawanie obrazu |
Kolor |
Kolor |
Kolor |
Monochromia |
Monochromia |
| Architektura systemu |
Czterordzeniowy procesor ARM 2 GHz |
| Pamięć |
2GB DDR4 |
| Składowanie |
32 GB pamięci EMMC |
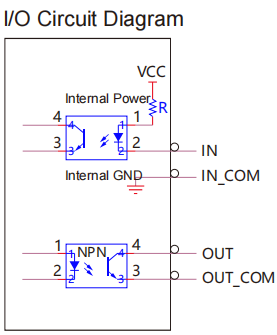
| Cyfrowe wejścia/wyjścia |
Cyfrowy interfejs we/wy; 1-kanałowe izolowane optycznie wejście GPI, 3-kanałowe izolowane optycznie wyjście GPO, 1-kanałowy port szeregowy RS232 |
| Wyjście wideo |
Interfejs LVDS |
| USB |
1-kanałowy USB2.0 |
| Zasilanie |
Napięcie stałe 24 V |
| Zużycie energii |
12W |
| Interfejs obiektywu |
Ostrość mechaniczna M12 |
| Źródło światła |
Źródło białego światła |
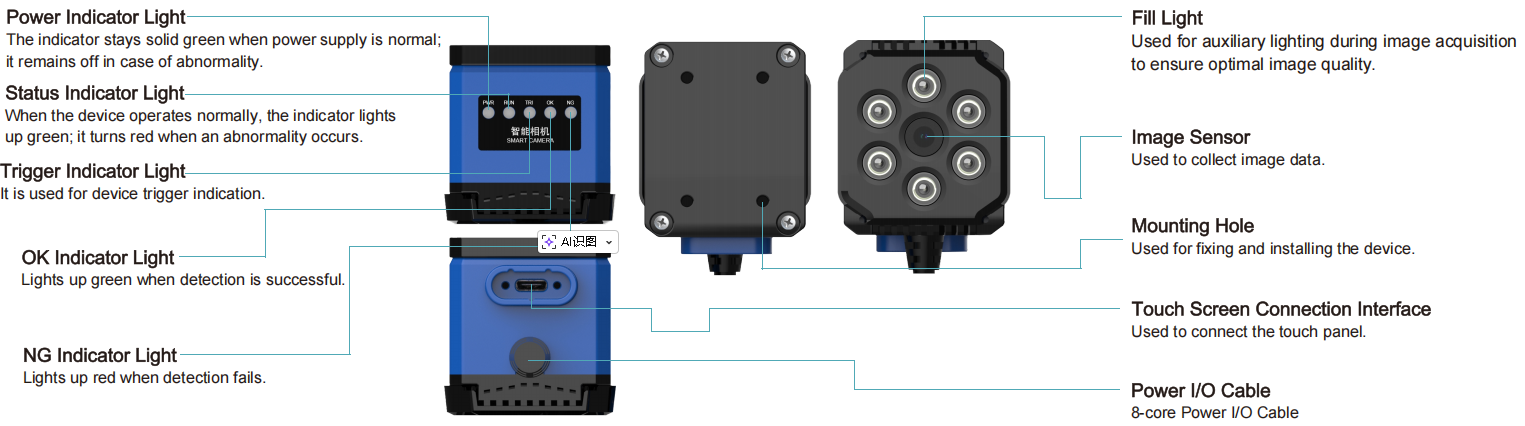
| Wskaźnik LED |
Zasilanie / Praca / Wyzwalanie / OK / NG |
| Funkcja algorytmu |
Wbudowany algorytm wizyjny z uczeniem Model-A; obsługuje wykrywanie kierunku do przodu/do tyłu, obecności/nieobecności, wymiaru, pozycji i rozpoznawania kolorów |
| Materiał obudowy |
Stop aluminium |
| Stopień ochrony |
IP67 |
| Temperatura otoczenia |
0-50 ℃ |
| Wilgotność otoczenia |
2 0% ~ 9 5% PH Bez kondensacji |
| Standardowa długość kabla zasilania i wejścia/wyjścia |
3 m |
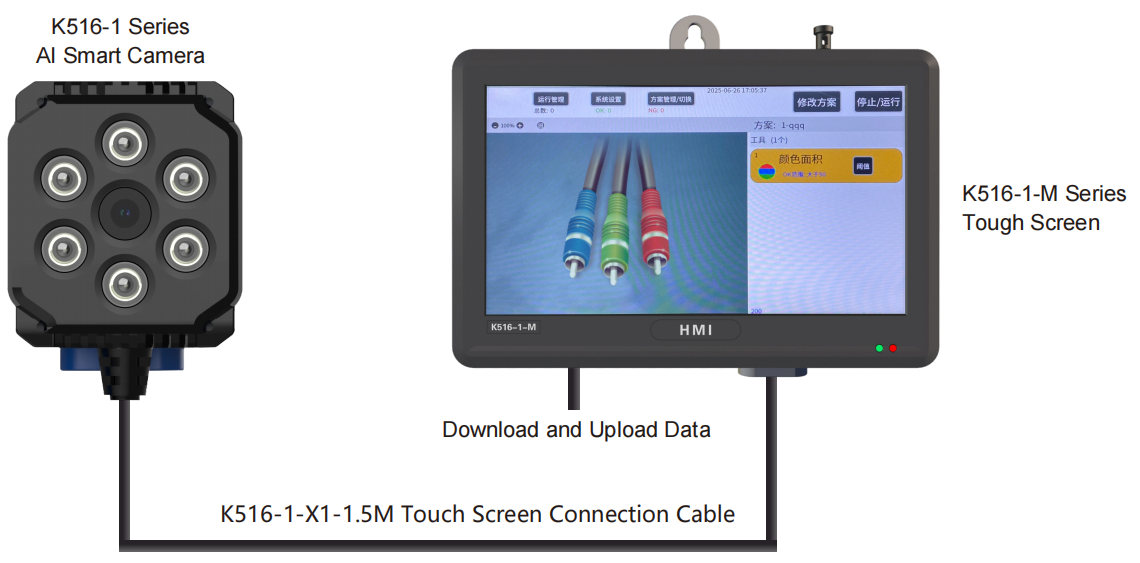
Parametry specyfikacji (panel dotykowy)
| Model |
K516-1-M |
| Rozmiar panelu |
7 cali |
| Rezolucja |
1024X600 |
| Kontrolka |
Lampka z wyświetlaczem PWR/dotykowym |
| Interfejs |
LVDS-USB |
| Tryb dotykowy |
Rezystancyjny |
| Napięcie |
Napięcie stałe 12 V |
| Moc |
5W |
| Stopień ochrony |
IP40 |
| Temperatura otoczenia |
0 ~ 50 ℃ |
| Wilgotność otoczenia |
20% ~ 95% RH, bez kondensacji |
| Rozmiar otwarcia |
260,2 mm x 179,8 mm |
| Waga |
450g |
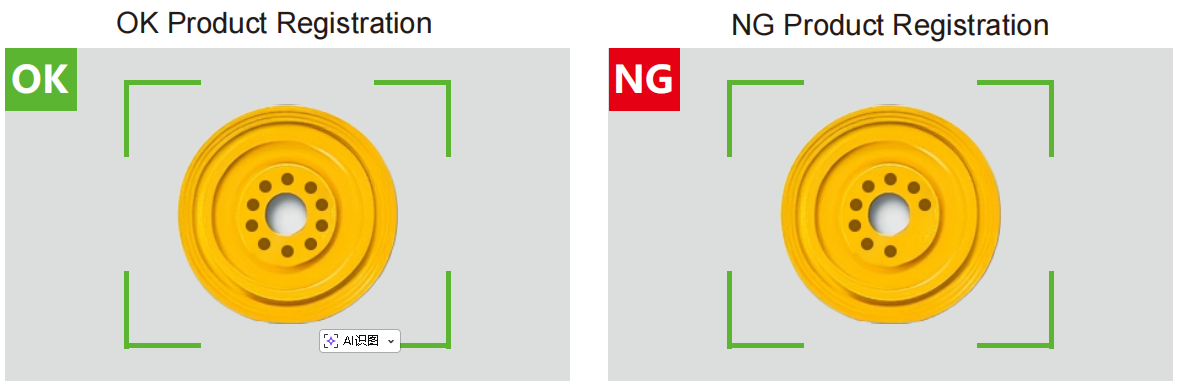
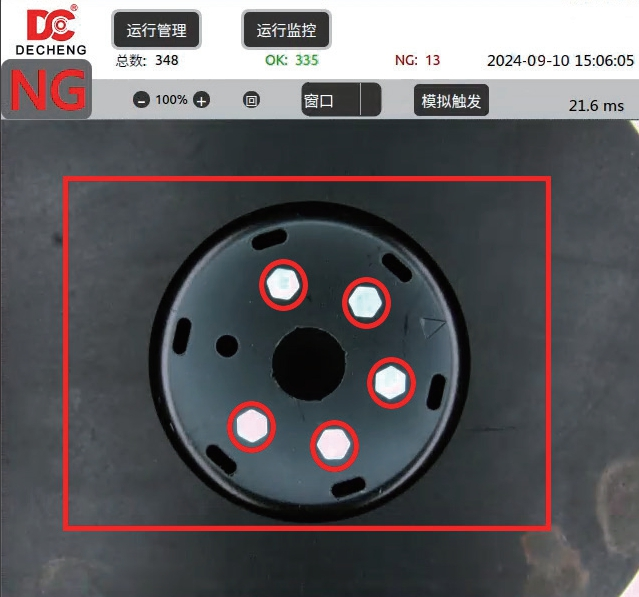
Numer rejestracyjny
Rejestruj tylko produkty OK i produkty NG, a system automatycznie dostosuje się do idealnych ustawień. Nawet jeśli nastąpią zmiany w przedmiotach obrabianych i środowisku, wystarczy dodatkowo zarejestrować nowe przedmioty. System automatycznie doda warunki detekcji, bez skomplikowanej konfiguracji i regulacji instalacji.
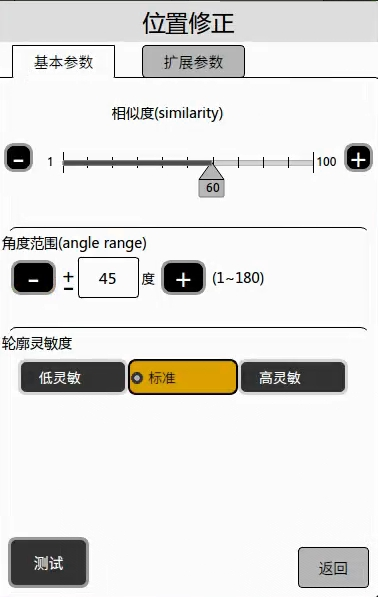
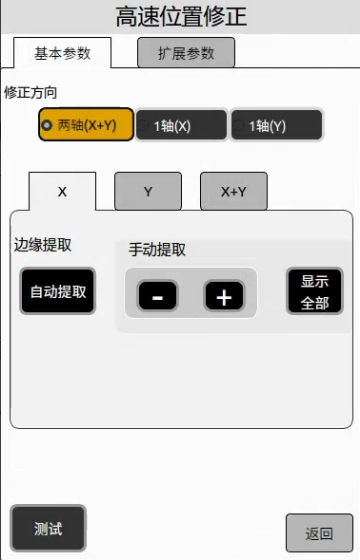
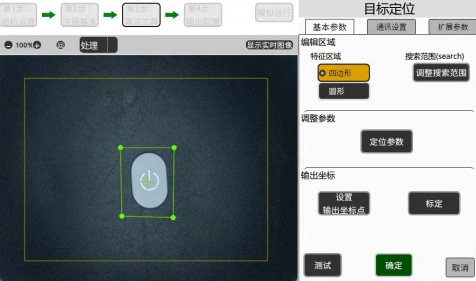
Korekcja pozycji: Popraw pozycję produktu poprzez dopasowanie konturu. Szybka korekcja pozycji: Koryguj produkt w kierunkach X i Y, wyszukując docelowe elementy czarno-białe.
Szczegóły produktu



Rysunek struktury
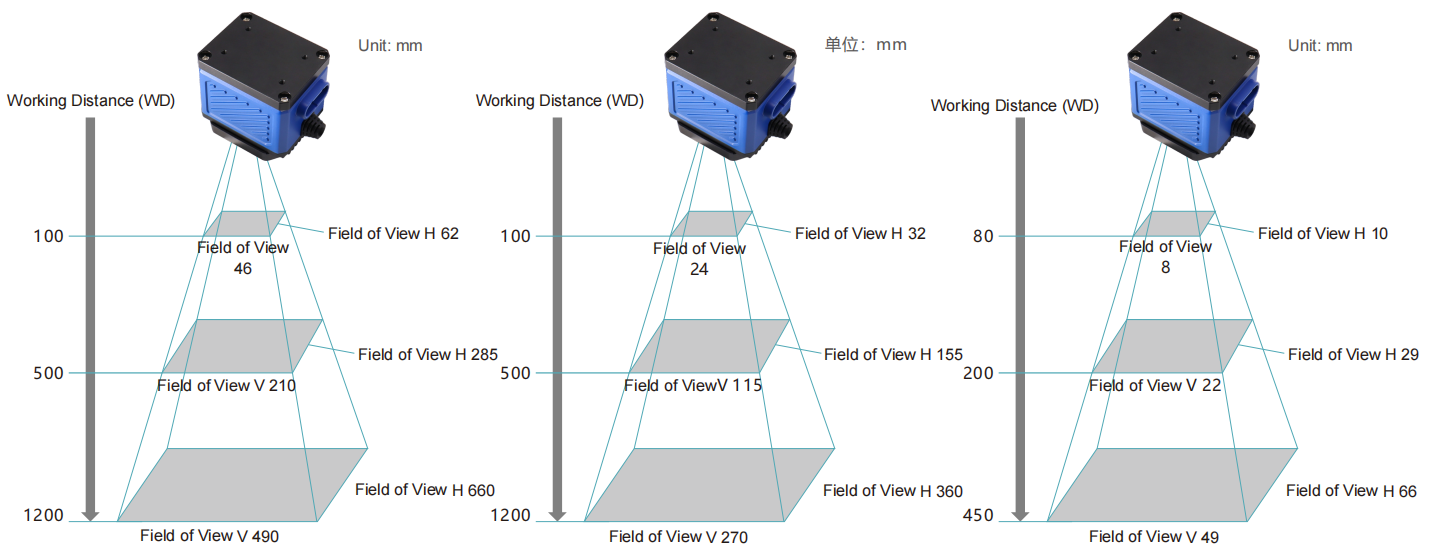
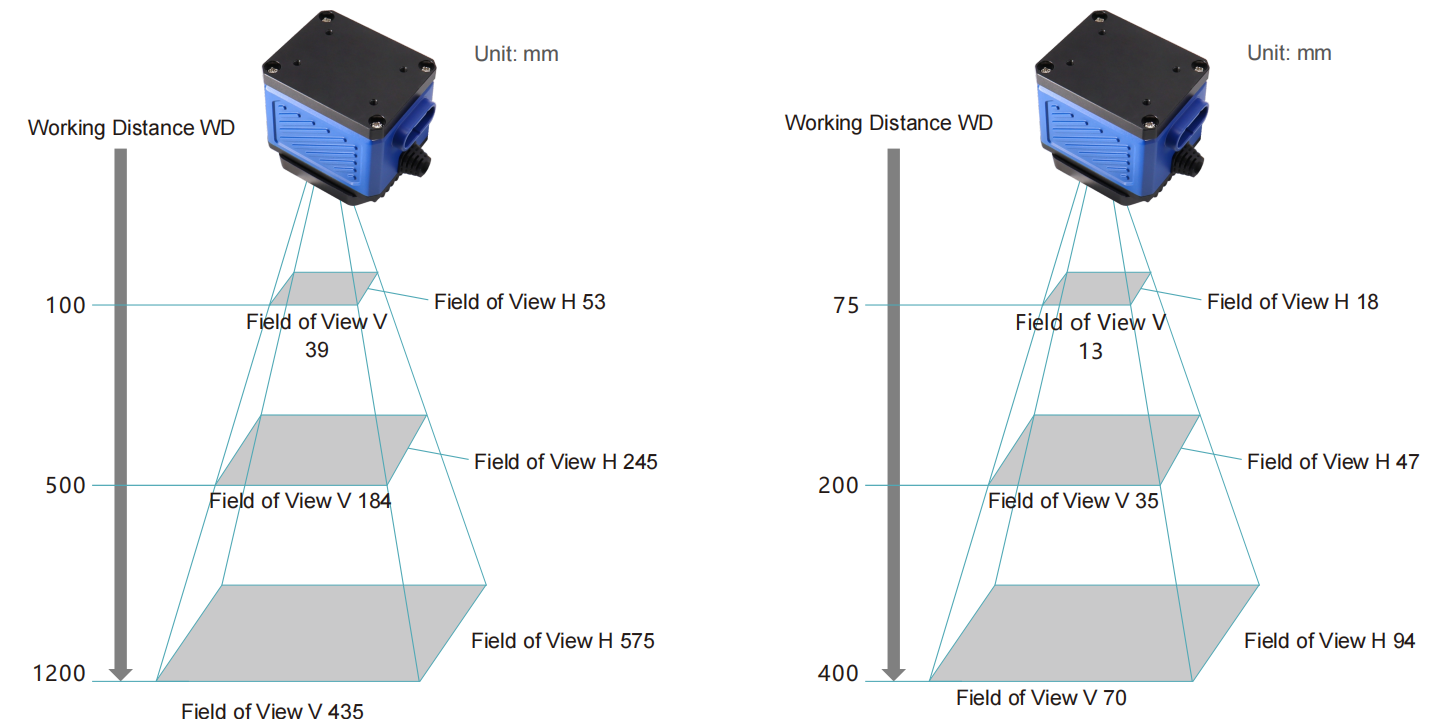
Wykres charakterystyki zasięgu detekcji
| Model |
Odległość montażowa |
Pole WidzeniaH |
Pole Widzenia V |
K516-1-A1
Typ szerokiego pola widzenia |
30 |
25 |
19 |
| 100 |
62 |
46 |
| 200 |
118 |
90 |
| 300 |
170 |
130 |
| 500 |
285 |
210 |
| 1200 |
660 |
490 |
| Model |
Odległość montażowa |
Pole WidzeniaH |
Pole Widzenia V |
K516-1-A2
Typ standardowy |
40 |
14 |
11 |
| 100 |
32 |
24 |
| 200 |
63 |
47 |
| 300 |
93 |
69 |
| 500 |
155 |
115 |
| 1200 |
360 |
270 |
| Model |
Odległość montażowa |
Pole WidzeniaH |
Pole Widzenia V |
K516-1-A3
Typ standardowy |
80 |
10 |
8 |
| 100 |
13 |
10 |
| 150 |
21 |
16 |
| 200 |
29 |
22 |
| 300 |
43 |
32 |
| 450 |
66 |
49 |
| Model |
Odległość robocza |
Pole Widzenia |
Pole Widzenia V |
K516-1-B1
Typ standardowy |
30 |
18 |
14 |
| 100 |
53 |
39 |
| 200 |
101 |
75 |
| 300 |
150 |
112 |
| 500 |
245 |
184 |
| 1200 |
575 |
435 |
| Model |
Odległość robocza |
Pole Widzenia |
Pole Widzenia V |
K516-1-B2
Typ standardowy |
75 |
18 |
13 |
| 100 |
23 |
18 |
| 150 |
35 |
26 |
| 200 |
47 |
35 |
| 300 |
71 |
53 |
| 400 |
94 |
70 |
Narzędzie do wykrywania algorytmów
Tryb standardowy: wyposażony w różnorodne narzędzia wykrywające, które z łatwością spełniają różne wymagania aplikacji.
Kontur dopasowujący obszar skali szarości


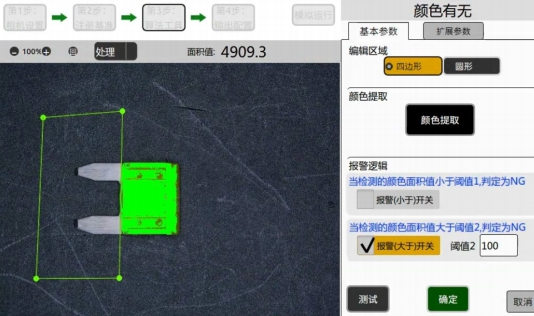
Pomiar szerokości obszaru koloru

Funkcja uczenia się szablonów Obecność/nieobecność

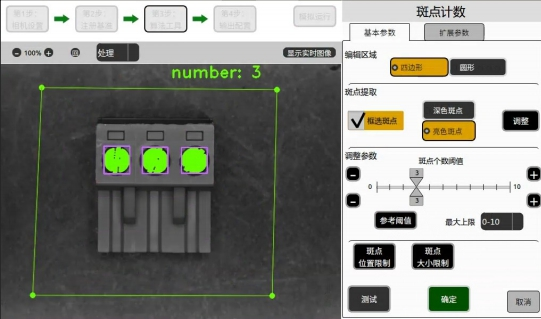
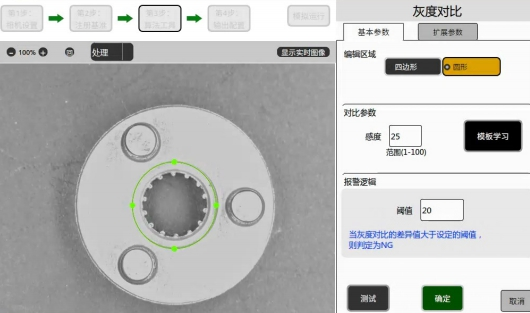
Porównanie skali szarości zliczania kropelek
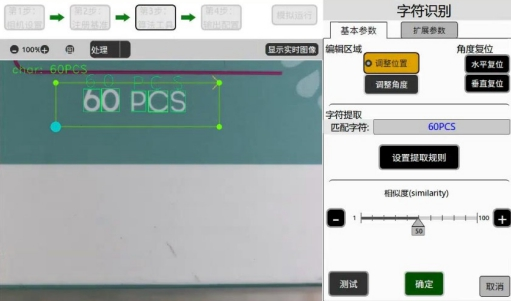
Rozpoznawanie znaków obecności/nieobecności koloru (OCR)
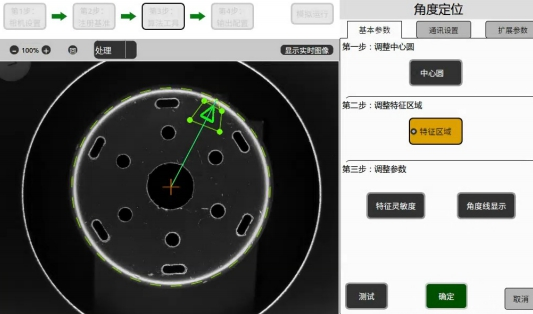
Pozycjonowanie kątowe Pozycjonowanie docelowe
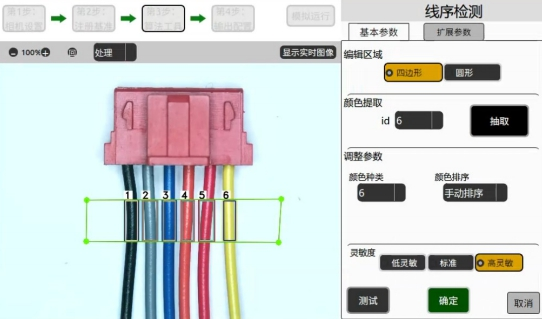
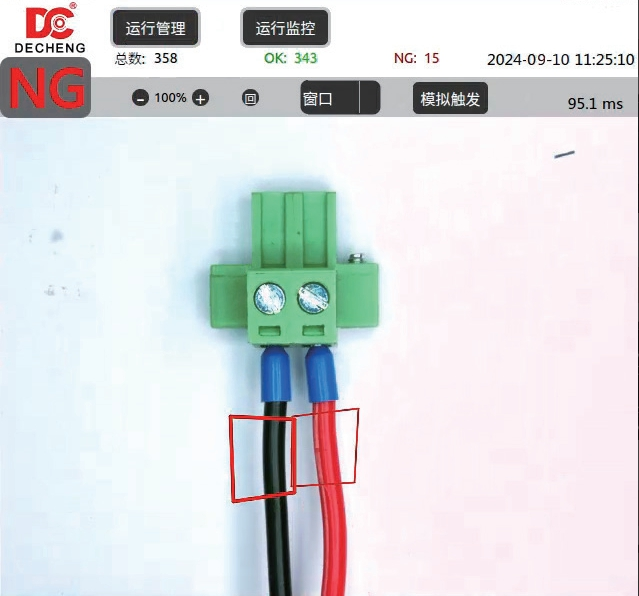
Kontrola sekwencji przewodów podziałowych. Uczenie się AI

Przypadki zastosowań
Dopasowanie do konturu: Identyfikuj na podstawie różnicy kształtu
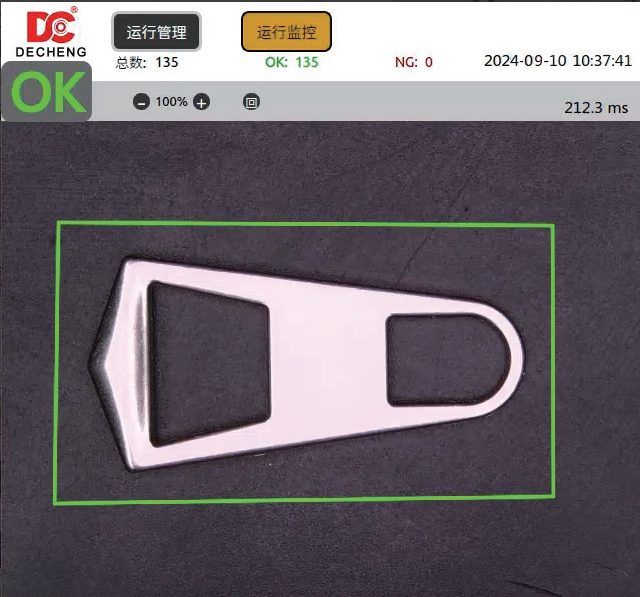
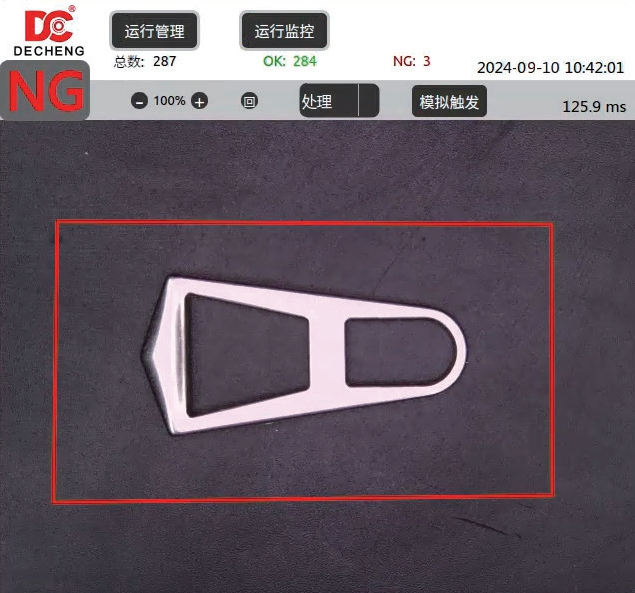
Wystarczy ująć cel, aby automatycznie wyodrębnić kontur. Radzi sobie z wahaniami jasności i indywidualnymi różnicami stanu powierzchni, które są trudne w przypadku znormalizowanych metod korelacji.
Obszar koloru: Identyfikuj według rozmiaru obszaru koloru

Na podstawie zarejestrowanego obszaru barwnego kwalifikowanych produktów obliczana jest zgodność z wykrytym celem. Wystarczy kliknąć kolor docelowy na obrazie, aby zakończyć wyodrębnianie kolorów w prosty sposób.
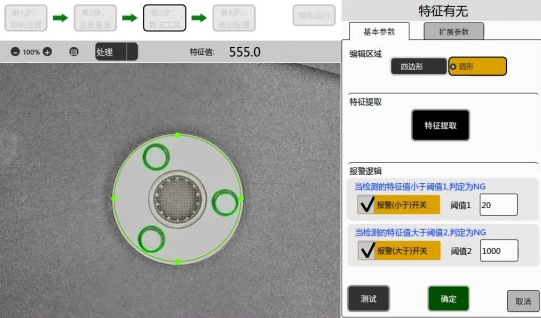
Funkcja Obecność/Nieobecność: Identyfikuj na podstawie liczby pikseli krawędziowych

Może identyfikować cele o nieustalonych kształtach lub różnicach w stanie powierzchni. Krawędź odnosi się do punktów granicznych zmian jasnych i ciemnych.
Obszar skali szarości: Identyfikacja na podstawie określonego poziomu jasności


Przyjmij obszar jasności zarejestrowanych dobrych produktów jako punkt odniesienia do obliczenia zgodności z celem wykrywania. Nadaje się do identyfikacji w oparciu o różnicę połysku i różnicę w obróbce powierzchni.
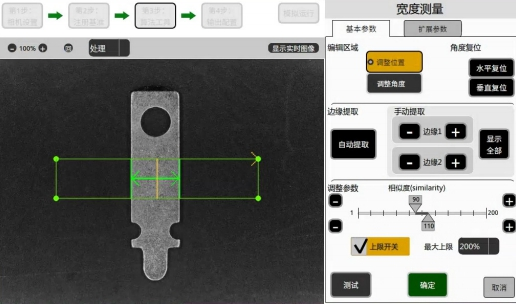
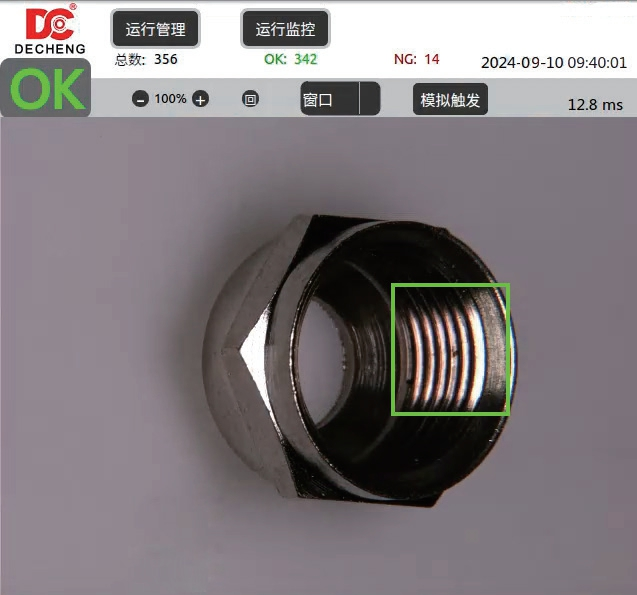
Pomiar szerokości: Identyfikacja na podstawie szerokości pomiędzy krawędziami
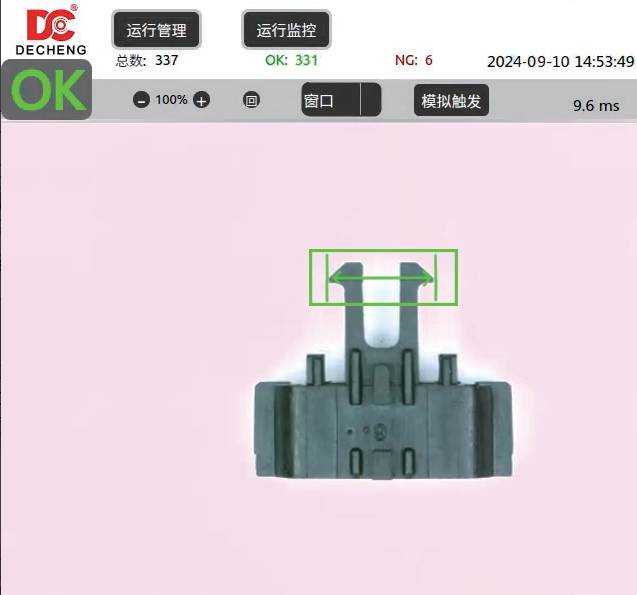
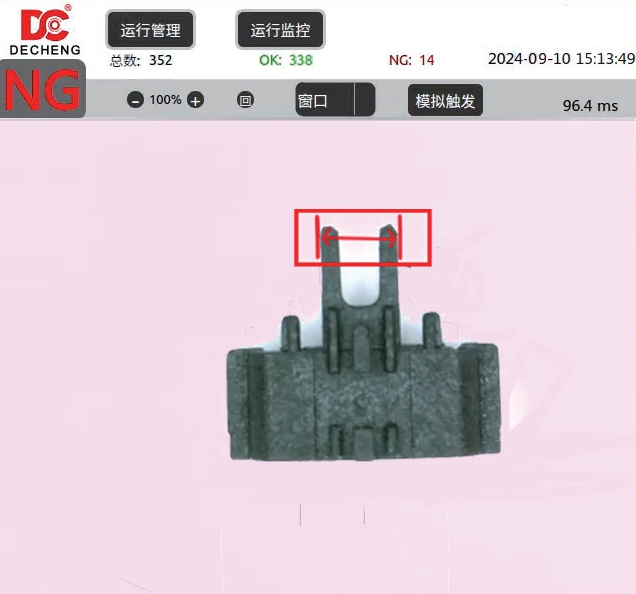
Może wykryć wypaczenie lub szerokość obiektu docelowego. Rzeczywisty wymiar można wyświetlić za pomocą funkcji skalowania.
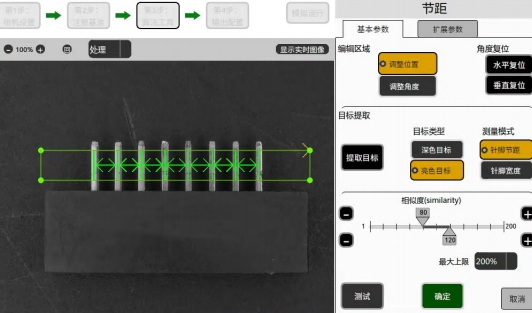
Skok: Identyfikacja na podstawie różnicy wysokości tonu
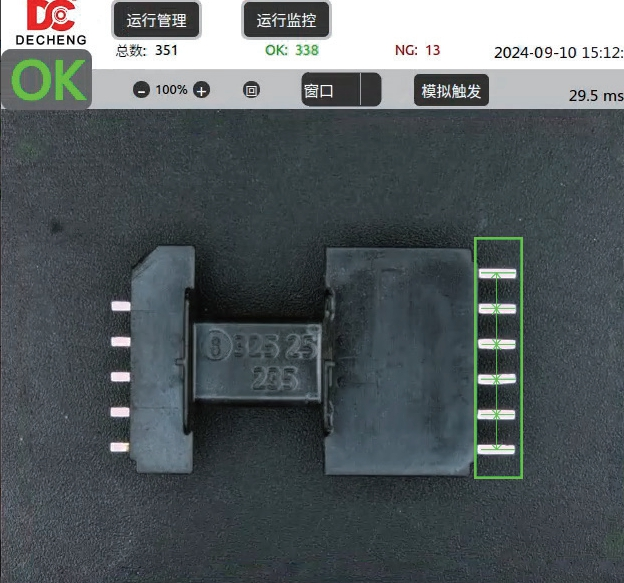
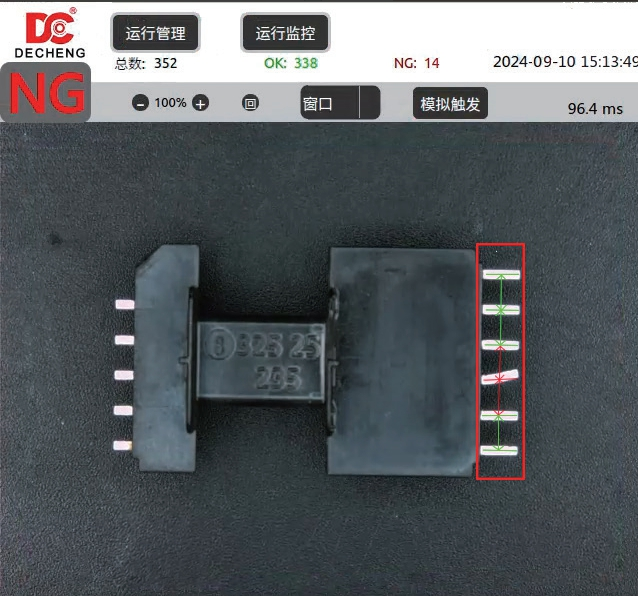
Może wykryć nie tylko wysokość, ale także szerokość pinu. Rzeczywisty wymiar można wyświetlić za pomocą funkcji skalowania.
Pozycjonowanie kątowe: Identyfikacja na podstawie niewspółosiowości kątowej i przesunięcia


Potrafi zidentyfikować niewspółosiowość kątową i przesunięcie celu w określonym zakresie.
Liczenie kropelek: Zidentyfikuj na podstawie liczby kropelek na celu

Na podstawie zarejestrowanej ilości blobów zakwalifikowanych produktów sprawdza, czy liczba blobów wykrytego celu jest spójna.
Rozpoznawanie znaków: Identyfikuj na podstawie różnic w znakach, liczbach i datach
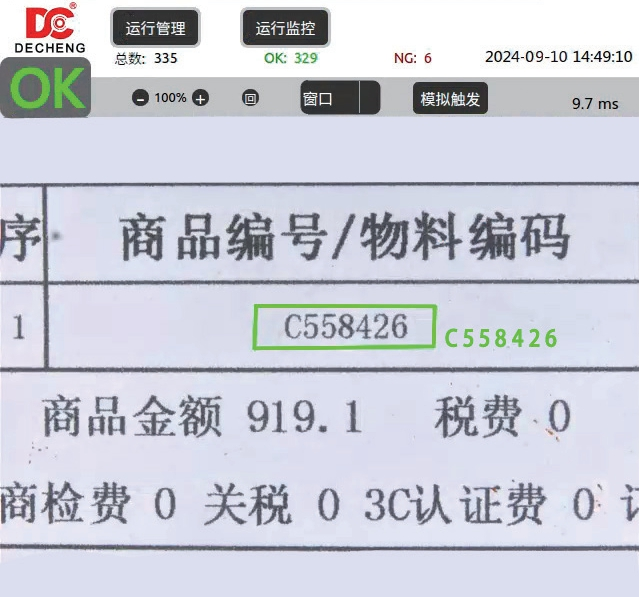

Na podstawie zarejestrowanych informacji o charakterze i dacie zakwalifikowanych produktów sprawdza, czy znaki i daty wykrytego celu są zgodne.
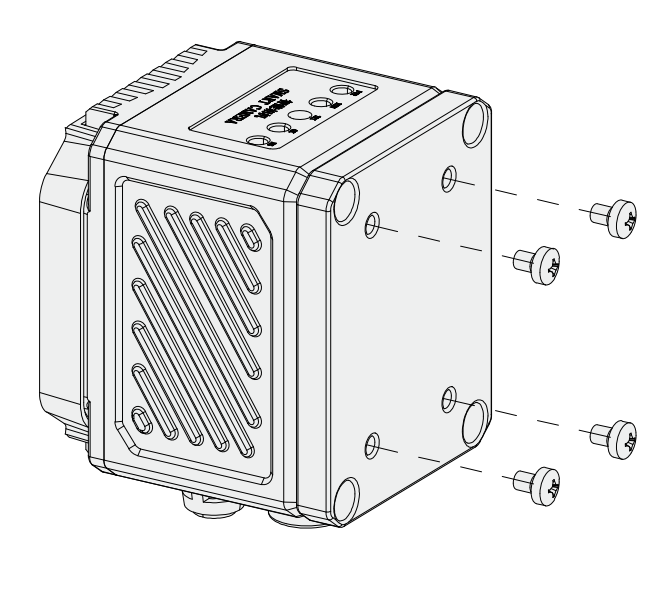
Instalacja urządzenia
Zamocuj urządzenie za pomocą śrub M3 poprzez wspornik montażowy i inne części mechaniczne. Obsługuje instalację pionową i poziomą, a sposób montażu można wybrać zgodnie z rzeczywistymi scenariuszami zastosowania.
Schemat połączeń