A proposito di selezione
300.000 Pixel 1,3 Megapixel
| Modello |
Descrizione della prestazione |
|
Modello |
Descrizione della prestazione |
| K516-1-A1 |
Obiettivo da 4,7 mm, colore |
K516-1-B1 |
Obiettivo da 8 mm, monocromatico |
| K516-1-A2 |
Obiettivo da 8 mm, colore |
K516-1-B2 |
Obiettivo da 16 mm, monocromatico |
| K516-1-A3 |
Obiettivo da 16 mm, colore |
|
|
Accessori

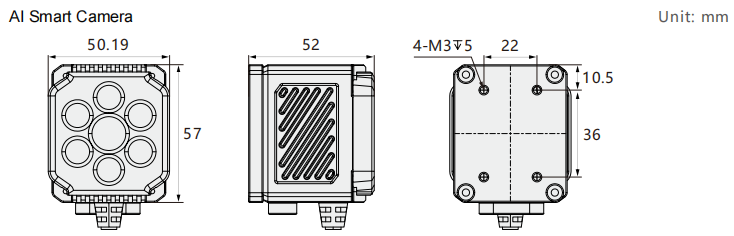
Dimensione
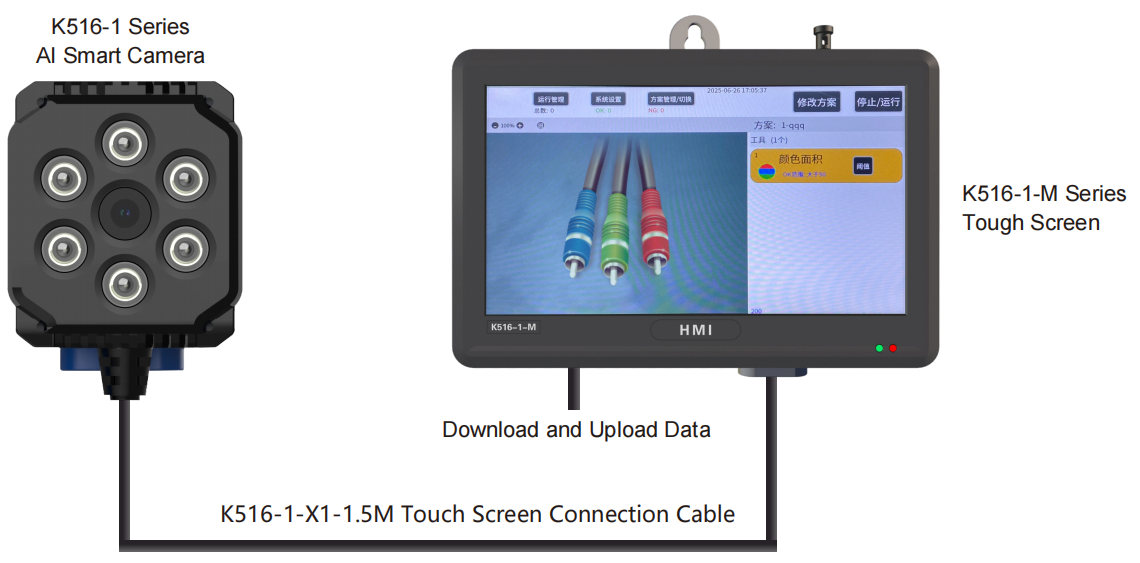
Descrizione del cavo di alimentazione e IO 8P
| Descrizione dell'interfaccia del segnale |
| Perno n. |
Colore |
Nome |
Descrizione |
| Perno 1 |
Rosso |
DC24 |
Alimentazione positiva |
| Perno 2 |
Nero |
0V/COM |
Negativo alimentazione/terminale comune I/O |
| Perno 3 |
Verde |
IN1 |
Ingresso trigger telecamera |
| Perno 4 |
Arancia |
USCITA1 |
Uscita 1 |
| Perno 5 |
Giallo |
USCITA2 |
Uscita 2 |
| Perno 6 |
Marrone |
USCITA3 |
Uscita 3 |
| Perno 7 |
Blu |
RS232RXD |
Ricevi dati |
| Perno 8 |
Grigio |
RS232_TXD |
Trasmettere dati |
Specifiche (fotocamera intelligente AI)
| Modello |
K516-1-A1 |
K516-1-A2 |
K516-1-A3 |
K516-1-B1 |
K516-1-B2 |
| Risoluzione |
640x⁴80 |
1280x960 |
| Pixel |
300.000 pixel |
1,3 Megapixel |
| Frequenza fotogrammi massima |
60 fps |
60 fps |
| Lente |
4,7 mm |
8 mm |
16mm |
8 mm |
16mm |
| Dimensione pixel |
3.744x3.744 |
3.744x3.744 |
3.744x3.744 |
3.744x3.744 |
3.744x3.744 |
| Riconoscimento delle immagini |
Colore |
Colore |
Colore |
Monocromo |
Monocromo |
| Architettura del sistema |
Processore quad-core ARM da 2 GHz |
| Memoria |
DDR4 da 2 GB |
| Magazzinaggio |
EMMC da 32 GB |
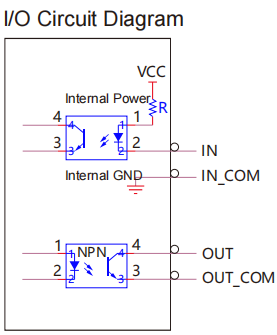
| I/O digitali |
Interfaccia I/O digitale; Ingresso GPI optoisolato a 1 canale, uscita GPO optoisolata a 3 canali, porta seriale RS232 a 1 canale |
| Uscita video |
Interfaccia LVDS |
| USB |
USB 2.0 a 1 canale |
| Alimentazione elettrica |
CC 24 V |
| Consumo energetico |
12 W |
| Interfaccia dell'obiettivo |
Messa a fuoco meccanica M12 |
| Sorgente luminosa |
Sorgente di luce bianca |
| Indicatore LED |
Accensione/Esegui/Trigger/OK/ERRATO |
| Funzione dell'algoritmo |
Algoritmo di visione integrato con apprendimento Modello A; supporta il rilevamento della direzione avanti/indietro, presenza/assenza, dimensione, posizione e riconoscimento del colore |
| Materiale dell'alloggiamento |
Lega di alluminio |
| Grado di protezione |
IP67 |
| Temperatura ambiente |
0-50℃ |
| Umidità ambientale |
2 0 % ~ 9 5 % PH Senza condensa |
| Lunghezza standard del cavo di alimentazione e IO |
3m |
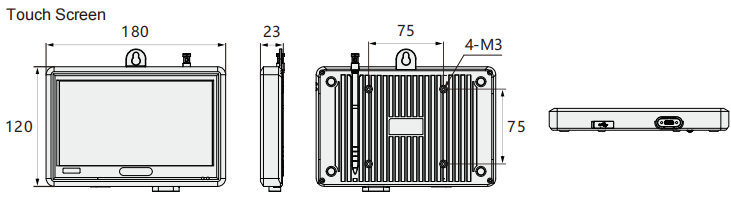
Parametri di specifica (pannello a sfioramento)
| Modello |
K516-1-M |
| Dimensioni del pannello |
7 pollici |
| Risoluzione |
1024X600 |
| Indicatore luminoso |
PWR/Lampada display touch |
| Interfaccia |
LVDS/USB |
| Modalità tocco |
Resistivo |
| Volaggio |
CC 12 V |
| Energia |
5 W |
| Grado di protezione |
IP40 |
| Temperatura ambiente |
0~50℃ |
| Umidità ambientale |
20%~95% UR, senza condensa |
| Dimensione di apertura |
260,2 mmX179,8 mm |
| Peso |
450 g |
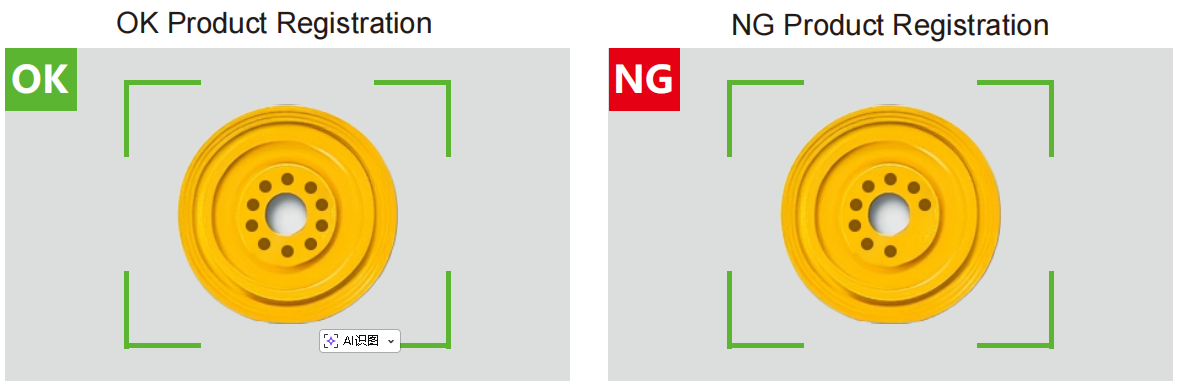
Riferimento alla registrazione
Registra solo i prodotti OK e i prodotti NG e il sistema può adattarsi automaticamente alle impostazioni ideali. Anche se si verificano cambiamenti nei pezzi e nell'ambiente, è sufficiente registrare solo i nuovi pezzi. Il sistema aggiungerà automaticamente le condizioni di rilevamento, senza complicate configurazioni o regolazioni di installazione.
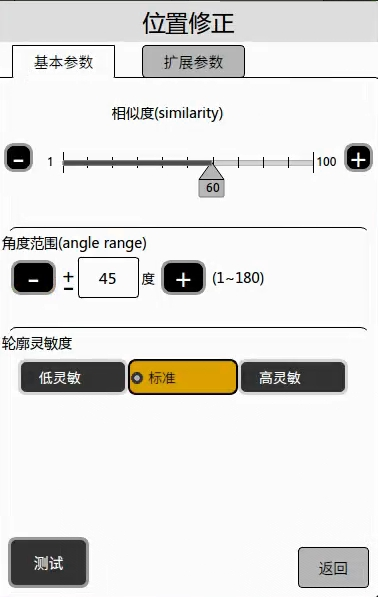
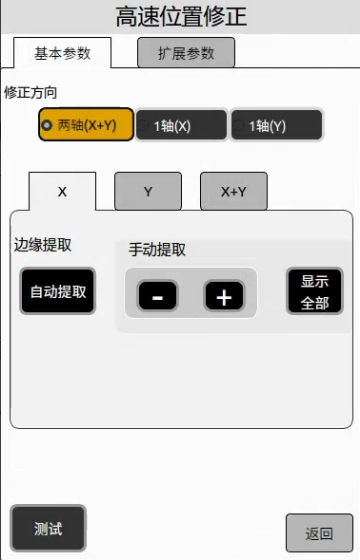
Correzione della posizione: correggere la posizione del prodotto mediante la corrispondenza del contorno. Correzione della posizione ad alta velocità: correggere il prodotto nelle direzioni X e Y cercando le caratteristiche in bianco e nero target.
Dettagli del prodotto



Disegno della struttura
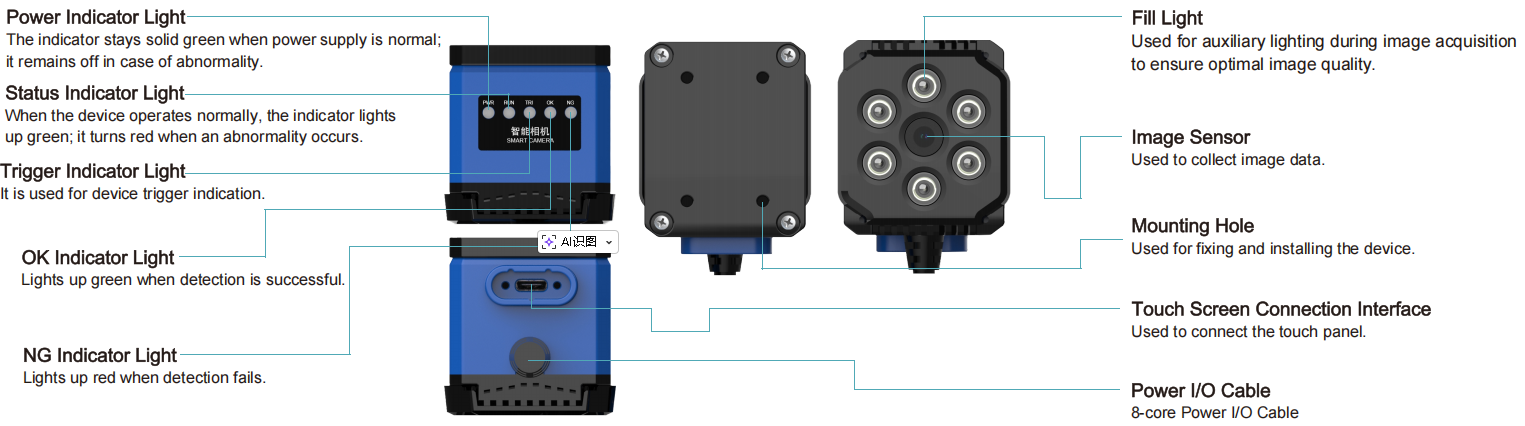
Diagramma caratteristico del campo di rilevamento
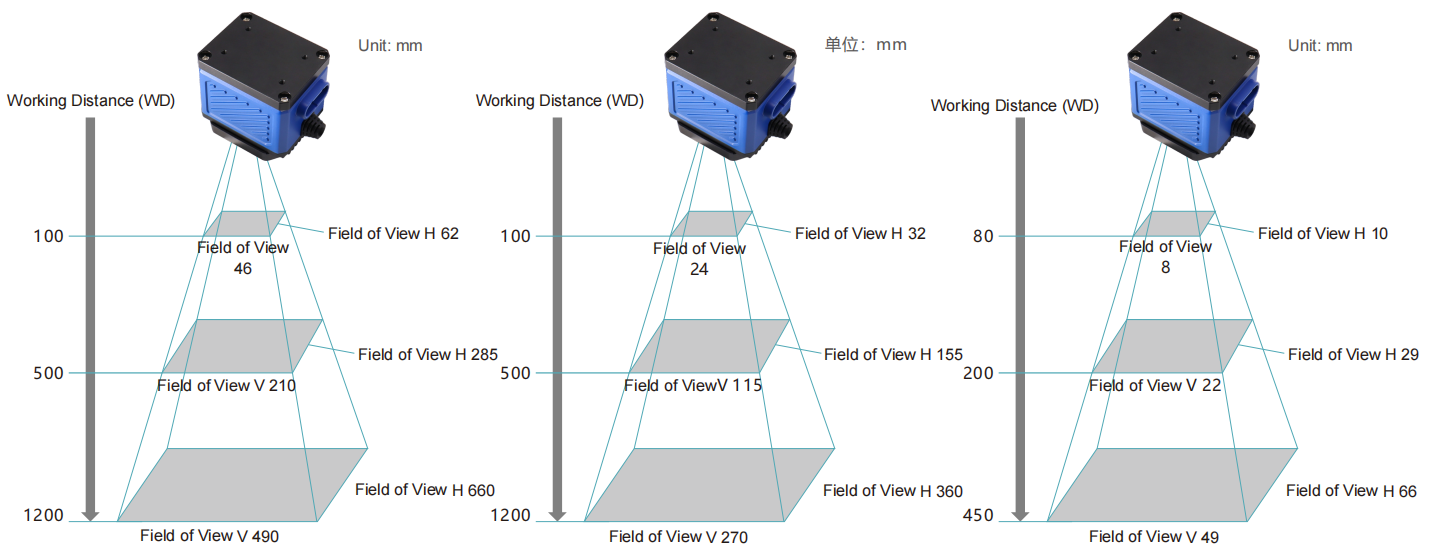
| Modello |
Distanza di montaggio |
Campo visivoH |
Campo visivo V |
K516-1-A1
Tipo con ampio campo visivo |
30 |
25 |
19 |
| 100 |
62 |
46 |
| 200 |
118 |
90 |
| 300 |
170 |
130 |
| 500 |
285 |
210 |
| 1200 |
660 |
490 |
| Modello |
Distanza di montaggio |
Campo visivoH |
Campo visivo V |
K516-1-A2
Tipo standard |
40 |
14 |
11 |
| 100 |
32 |
24 |
| 200 |
63 |
47 |
| 300 |
93 |
69 |
| 500 |
155 |
115 |
| 1200 |
360 |
270 |
| Modello |
Distanza di montaggio |
Campo visivoH |
Campo visivo V |
K516-1-A3
Tipo standard |
80 |
10 |
8 |
| 100 |
13 |
10 |
| 150 |
21 |
16 |
| 200 |
29 |
22 |
| 300 |
43 |
32 |
| 450 |
66 |
49 |
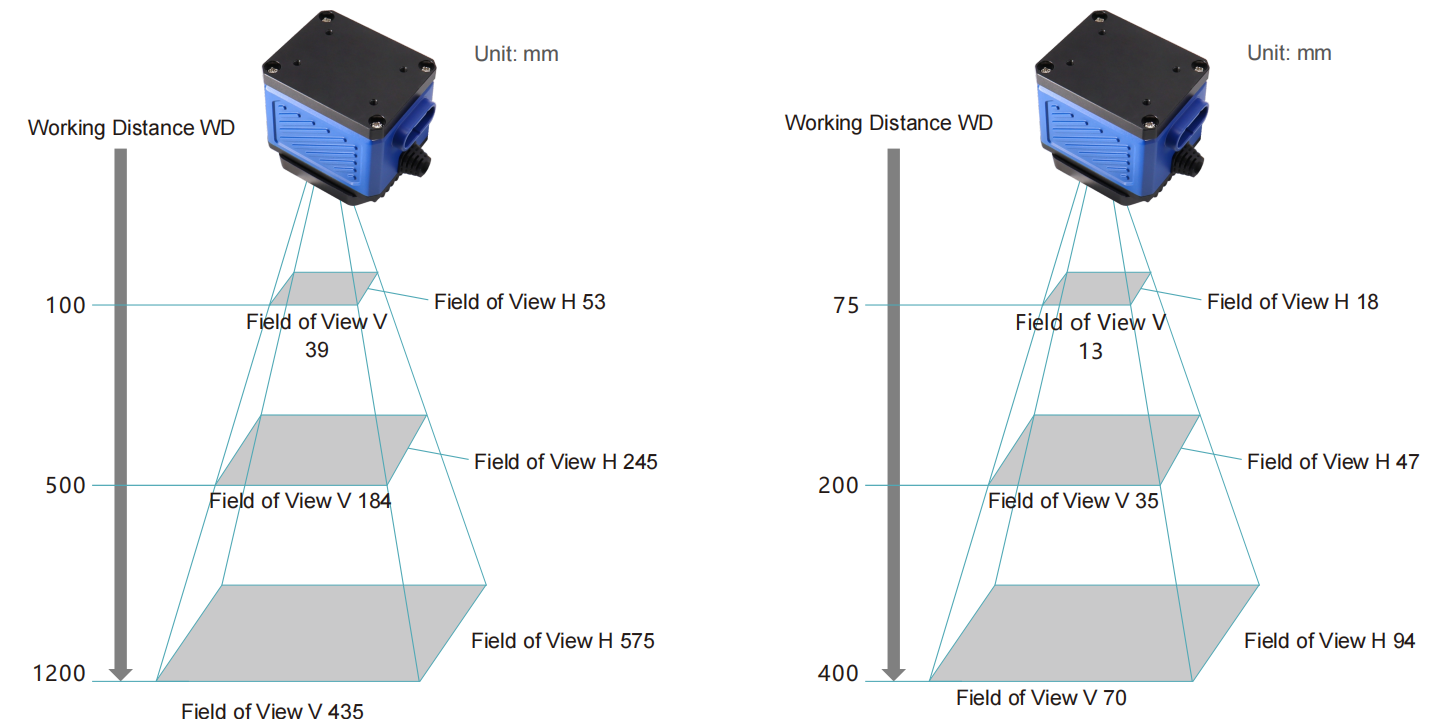
| Modello |
Distanza di lavoro |
Campo visivoH |
Campo visivo V |
K516-1-B1
Tipo standard |
30 |
18 |
14 |
| 100 |
53 |
39 |
| 200 |
101 |
75 |
| 300 |
150 |
112 |
| 500 |
245 |
184 |
| 1200 |
575 |
435 |
| Modello |
Distanza di lavoro |
Campo visivoH |
Campo visivo V |
K516-1-B2
Tipo standard |
75 |
18 |
13 |
| 100 |
23 |
18 |
| 150 |
35 |
26 |
| 200 |
47 |
35 |
| 300 |
71 |
53 |
| 400 |
94 |
70 |
Strumento di rilevamento degli algoritmi
Modalità standard: dotata di una varietà di strumenti di rilevamento per soddisfare facilmente i vari requisiti applicativi.
Area della scala di grigi di corrispondenza del contorno


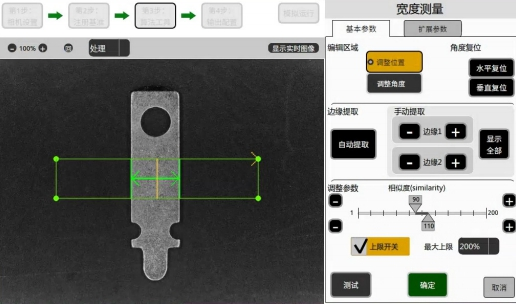
Misurazione della larghezza dell'area colorata

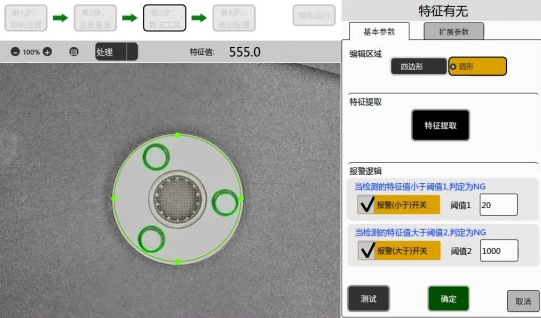
Presenza/Assenza della funzionalità di apprendimento del modello

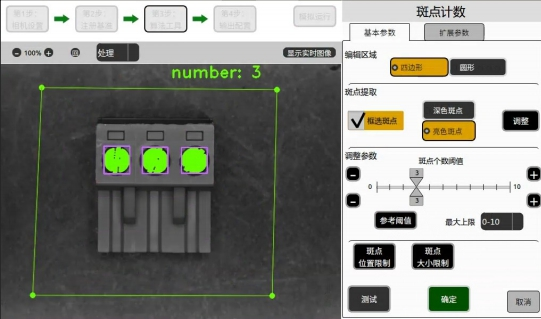
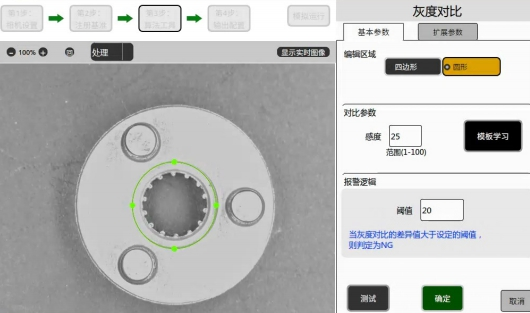
Conteggio BLOB Confronto in scala di grigi
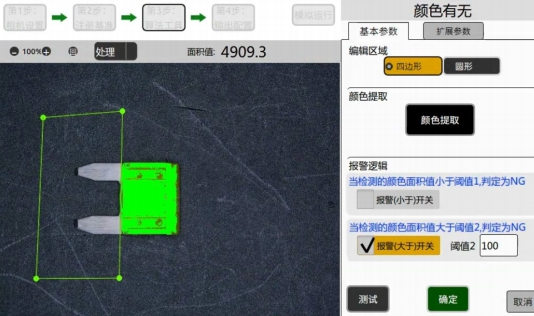
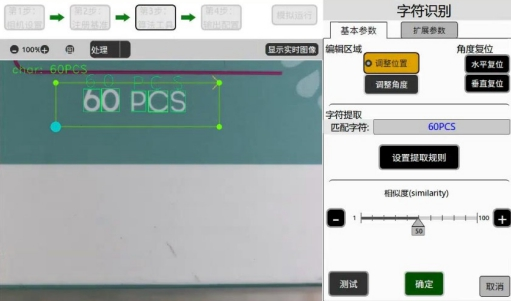
Riconoscimento dei caratteri di presenza/assenza di colore (OCR)
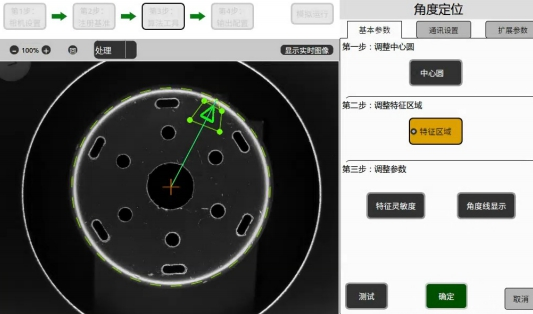
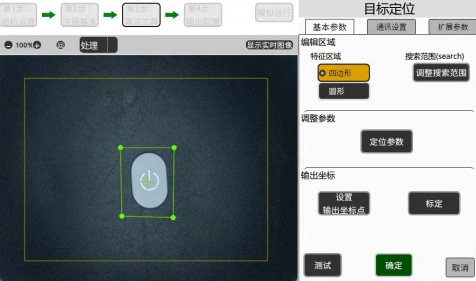
Posizionamento angolare Posizionamento target
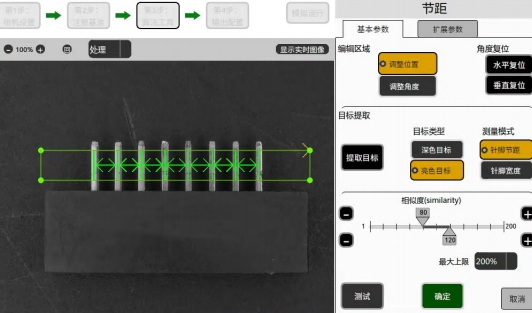
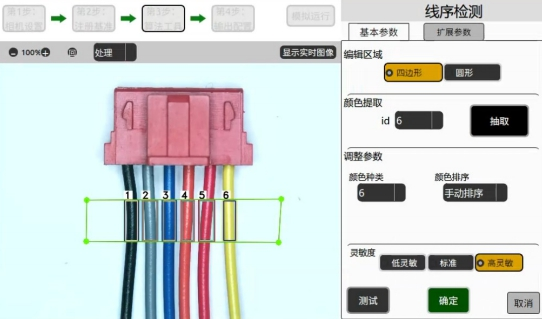
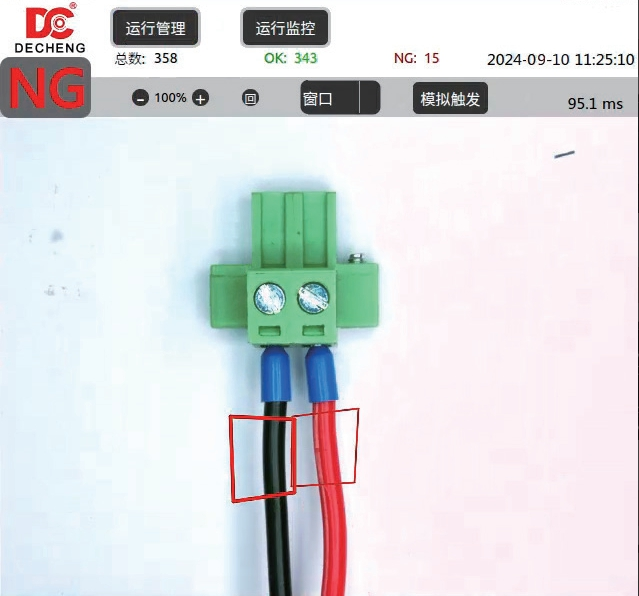
Ispezione della sequenza dei fili del passo Apprendimento AI

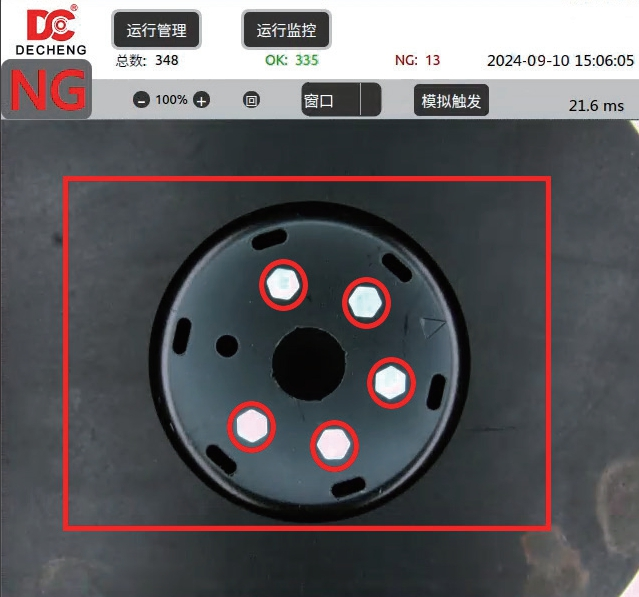
Casi di applicazione
Corrispondenza del contorno: identificare in base alla differenza di forma
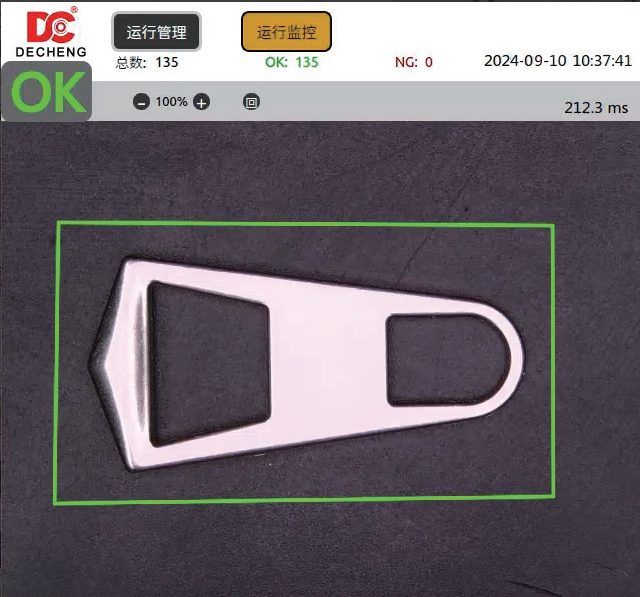
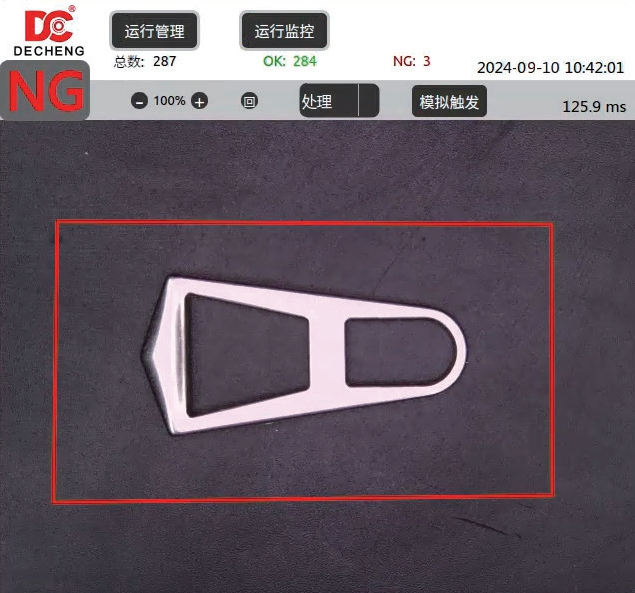
È sufficiente racchiudere il target per estrarre automaticamente il contorno. È in grado di gestire le fluttuazioni di luminosità e le differenze individuali delle condizioni superficiali che sono difficili per i metodi di correlazione normalizzati.
Area colore: identificare in base alla dimensione dell'area colore

In base all'area cromatica registrata dei prodotti qualificati, viene calcolata la coerenza con il target rilevato. Basta fare clic sul colore target nell'immagine per completare l'estrazione del colore con facilità.
Funzionalità Presenza/Assenza: identificazione in base al numero di pixel sul bordo

Può identificare target con forme non fisse o differenze nelle condizioni della superficie. Il bordo si riferisce ai punti di confine dei cambiamenti di luce e buio.
Area della scala di grigi: identificazione tramite il livello di luminosità specificato


Prendere l'area di luminosità dei buoni prodotti registrati come punto di riferimento per calcolare la coerenza con l'obiettivo di rilevamento. È adatto per l'identificazione in base alla differenza di lucentezza e alla differenza di lavorazione della superficie.
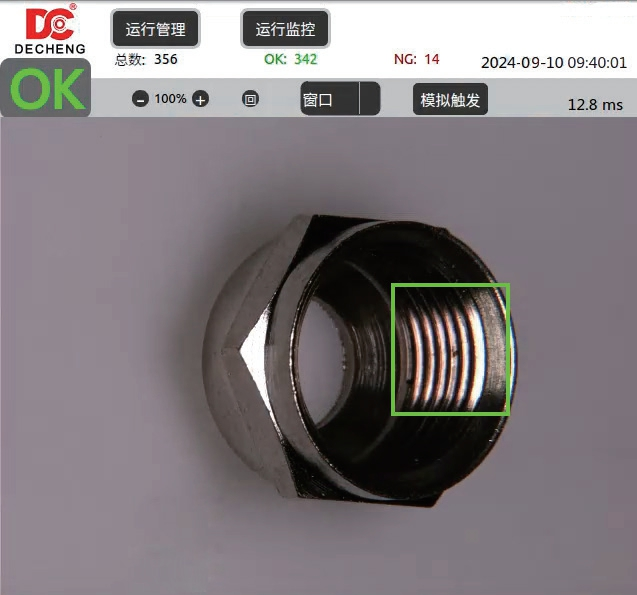
Misurazione della larghezza: identificazione in base alla larghezza tra i bordi
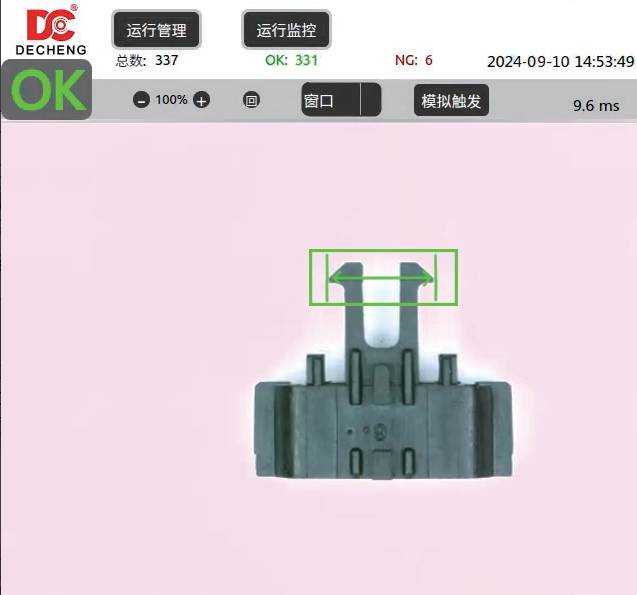
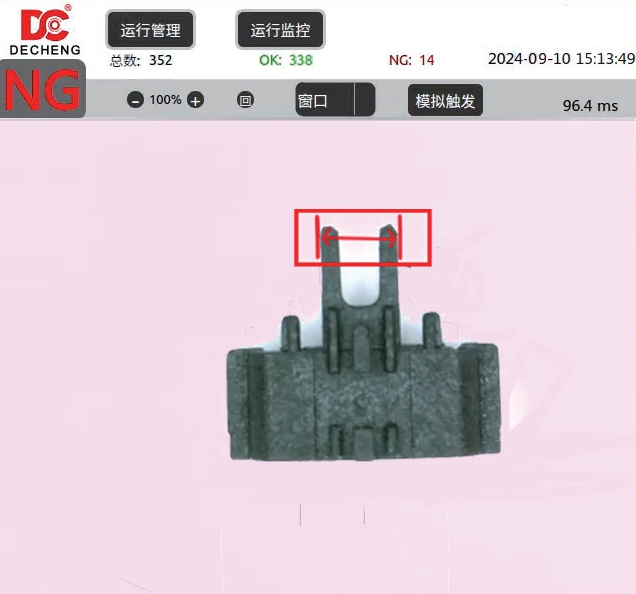
Può rilevare la deformazione o la larghezza dell'oggetto target. La dimensione effettiva può essere visualizzata utilizzando la funzione di ridimensionamento.
Intonazione: identificazione tramite differenza di altezza
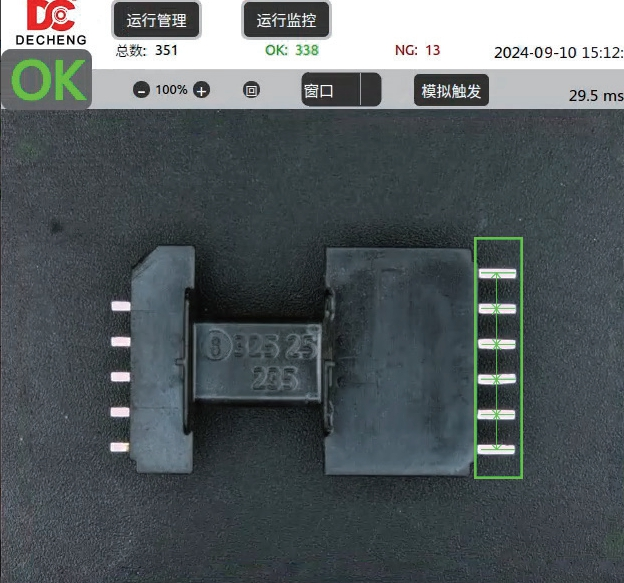
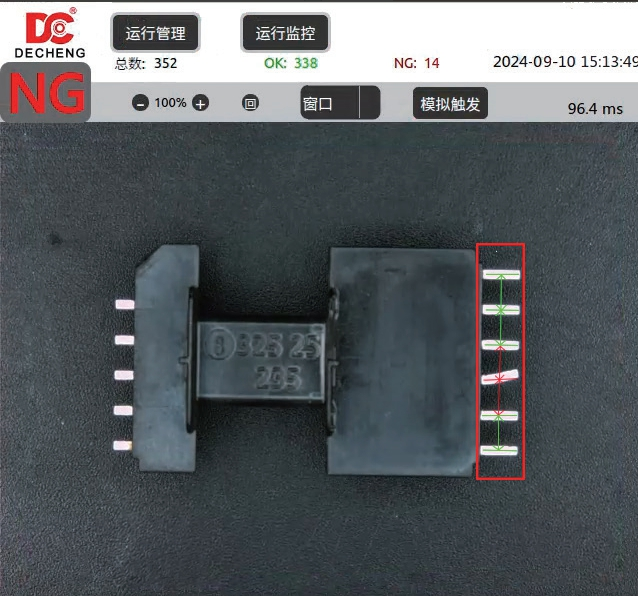
È in grado di rilevare non solo il passo ma anche la larghezza del perno. La dimensione effettiva può essere visualizzata utilizzando la funzione di ridimensionamento.
Posizionamento angolare: identificare in base al disallineamento angolare e all'offset


Può identificare il disallineamento angolare e l'offset del target entro l'intervallo specificato.
Conteggio BLOB: identificare in base al numero di BLOB sul target

In base alla quantità di blob registrata dei prodotti qualificati, controlla se il numero di blob della destinazione rilevata è coerente.
Riconoscimento dei caratteri: identificare in base alle differenze di caratteri, numeri e date
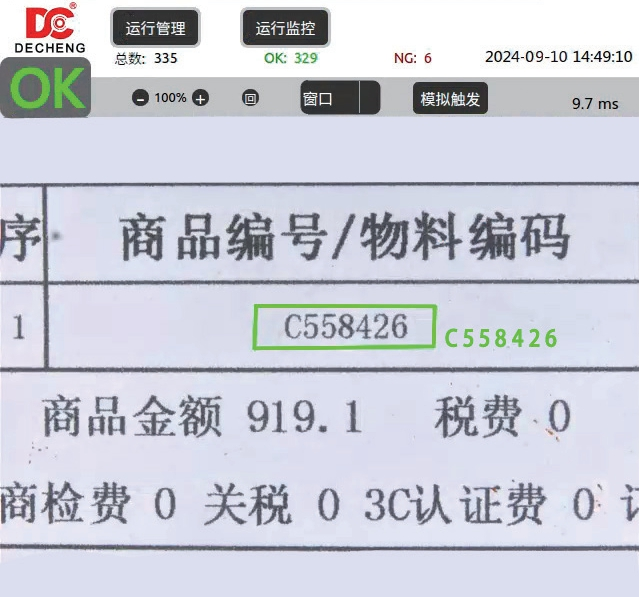

In base alle informazioni sui caratteri e sulla data registrati dei prodotti qualificati, verifica se i caratteri e le date del target rilevato sono coerenti.
Installazione del dispositivo
Fissare il dispositivo con viti M3 tramite la staffa di montaggio e altre parti meccaniche. Supporta l'installazione verticale e orizzontale e il metodo di montaggio può essere selezionato in base agli scenari applicativi reali.
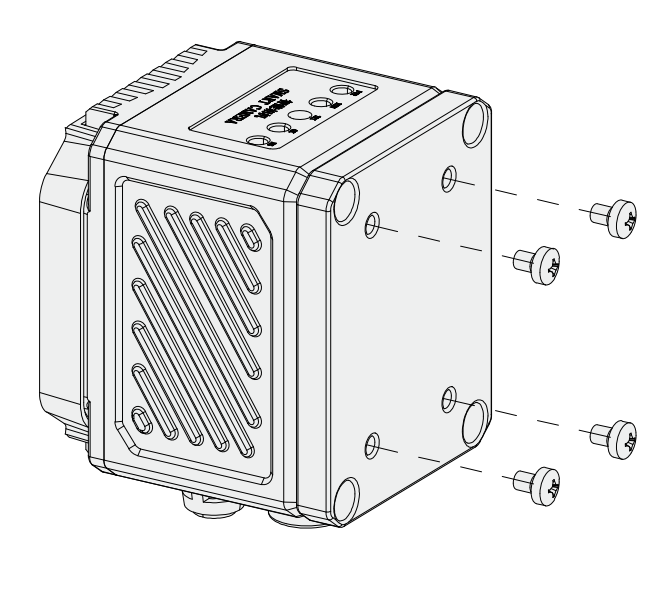
Diagramma schematico di connessione