À propos de la sélection
300 000 pixels 1,3 mégapixels
| Modèle |
Description des performances |
|
Modèle |
Description des performances |
| K516-1-A1 |
Objectif 4,7 mm, couleur |
K516-1-B1 |
Objectif 8 mm, monochrome |
| K516-1-A2 |
Objectif 8 mm, couleur |
K516-1-B2 |
Objectif 16 mm, monochrome |
| K516-1-A3 |
Objectif 16 mm, couleur |
|
|
Accessoires

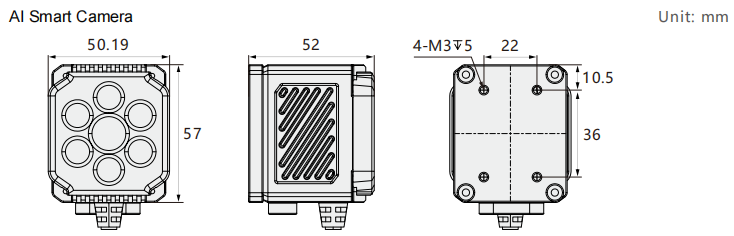
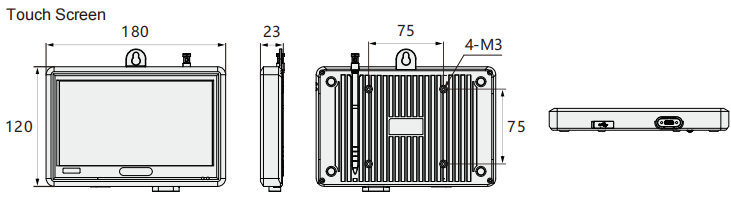
Dimension
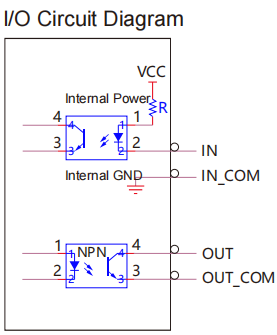
Description du câble d'alimentation et d'E/S 8P
| Description de l'interface de signal |
| Numéro de broche |
Couleur |
Nom |
Description |
| Broche 1 |
Rouge |
DC24 |
Alimentation positive |
| Broche 2 |
Noir |
0V/COM |
Alimentation négative / borne commune E/S |
| Broche 3 |
Vert |
EN1 |
Entrée de déclenchement de la caméra |
| Broche 4 |
Orange |
SORTIE1 |
Sortie 1 |
| Broche 5 |
Jaune |
SORTIE2 |
Sortie 2 |
| Broche 6 |
Brun |
SORTIE3 |
Sortie 3 |
| Broche 7 |
Bleu |
RS232RXD |
Recevoir des données |
| Broche 8 |
Gris |
RS232_TXD |
Transmettre des données |
Spécifications (caméra intelligente AI)
| Modèle |
K516-1-A1 |
K516-1-A2 |
K516-1-A3 |
K516-1-B1 |
K516-1-B2 |
| Résolution |
640x⁴80 |
1280x960 |
| Pixels |
300 000 pixels |
1,3 mégapixels |
| Fréquence d'images maximale |
60 ips |
60 ips |
| Lentille |
4,7 mm |
8mm |
16mm |
8mm |
16mm |
| Taille des pixels |
3.744x3.744 |
3.744x3.744 |
3.744x3.744 |
3.744x3.744 |
3.744x3.744 |
| Reconnaissance d'images |
Couleur |
Couleur |
Couleur |
Monochromes |
Monochromes |
| Architecture du système |
Processeur quadricœur ARM 2 GHz |
| Mémoire |
2 Go DDR4 |
| Stockage |
32 Go de mémoire EMMC |
| E/S numériques |
Interface E/S numérique ; Entrée GPI opto-isolée à 1 canal, sortie GPO opto-isolée à 3 canaux, port série RS232 à 1 canal |
| Sortie vidéo |
Interface LVDS |
| USB |
USB2.0 1 canal |
| Alimentation |
C.C 24 V |
| Consommation d'énergie |
12W |
| Interface d'objectif |
Mise au point mécanique M12 |
| Source lumineuse |
Source de lumière blanche |
| Indicateur LED |
Alimentation/Exécution/Gâchette/OK/NG |
| Fonction d'algorithme |
Algorithme de vision intégré avec apprentissage Model-A ; prend en charge la détection de la direction avant/arrière, de la présence/absence, de la dimension, de la position et de la reconnaissance des couleurs |
| Matériau du boîtier |
Alliage d'aluminium |
| Degré de protection |
IP67 |
| Température ambiante |
0-50 ℃ |
| Humidité ambiante |
2 0 % ~ 9 5 % PH Sans condensation |
| Longueur standard du câble d'alimentation et d'E/S |
3m |
Paramètres de spécification (écran tactile)
| Modèle |
K516-1-M |
| Taille du panneau |
7 pouces |
| Résolution |
1024X600 |
| Voyant lumineux |
Lampe à affichage PWR/tactile |
| Interface |
LVDS/USB |
| Mode tactile |
Résistif |
| Volage |
C.C 12 V |
| Pouvoir |
5W |
| Degré de protection |
IP40 |
| Température ambiante |
0 ~ 50 ℃ |
| Humidité ambiante |
20 % ~ 95 % HR, sans condensation |
| Taille d'ouverture |
260,2 mm X 179,8 mm |
| Poids |
450g |
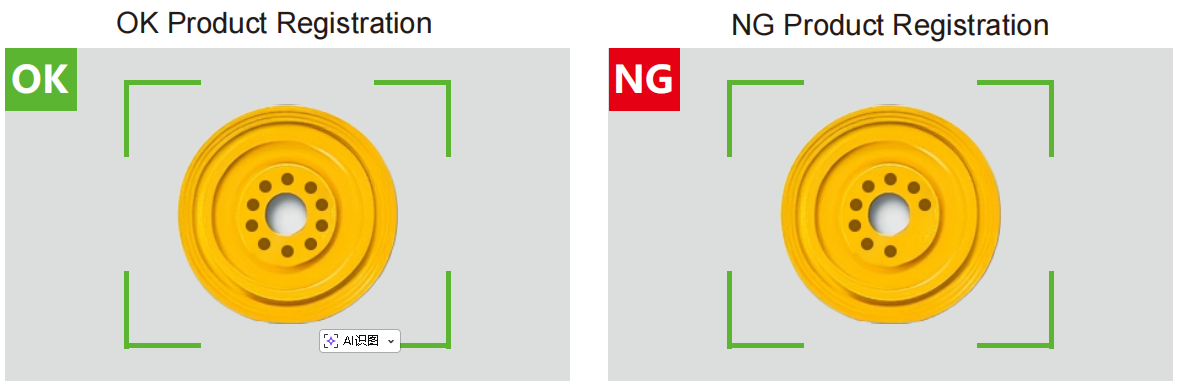
Référence d'inscription
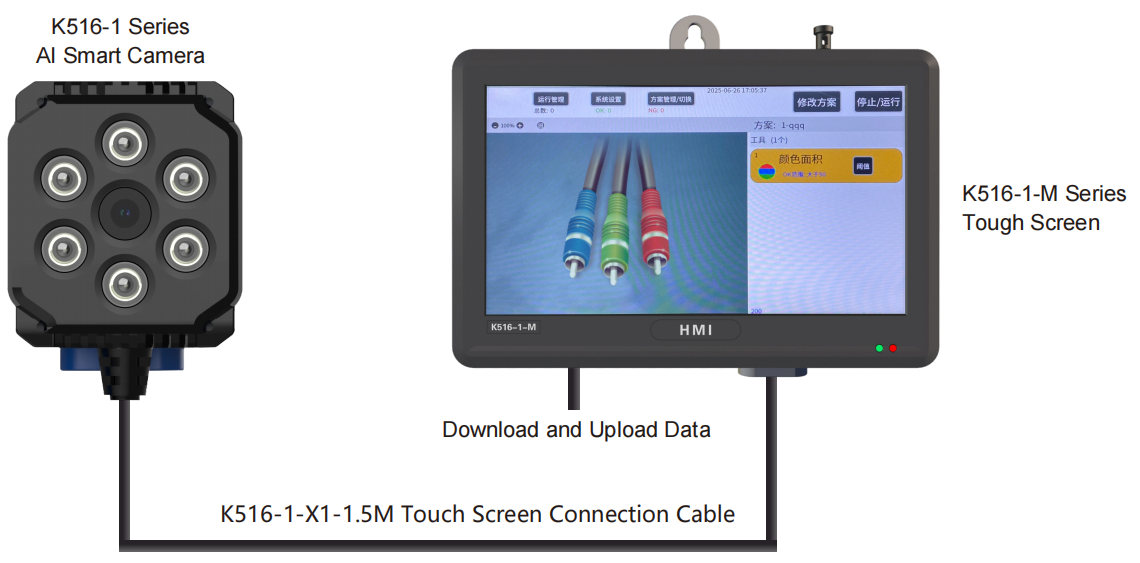
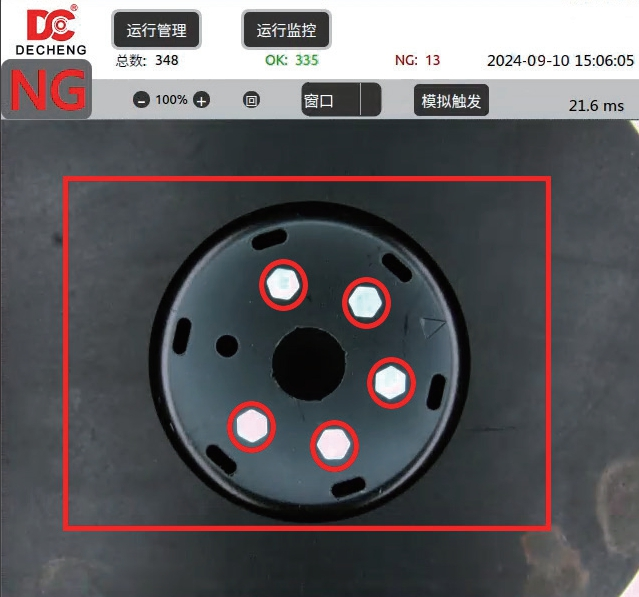
Enregistrez uniquement les produits OK et NG, et le système peut automatiquement s'ajuster aux paramètres idéaux. Même en cas de modifications des pièces à usiner et de l'environnement, il vous suffit d'enregistrer de nouvelles pièces en plus. Le système ajoutera automatiquement des conditions de détection, sans configuration compliquée ni ajustements d'installation.
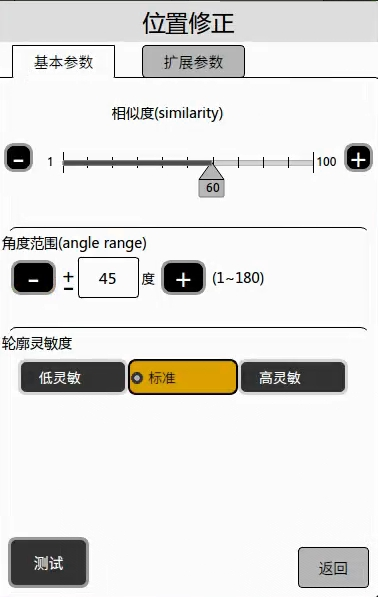
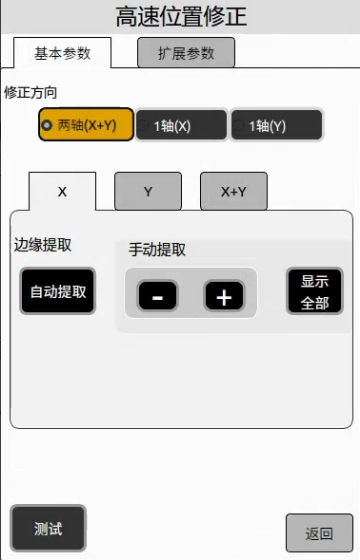
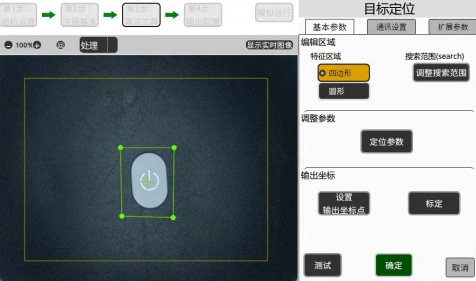
Correction de position : corrigez la position du produit en faisant correspondre les contours. Correction de position à grande vitesse : corrigez le produit dans les directions X et Y en recherchant les caractéristiques cibles en noir et blanc.
Détails du produit



Dessin de structure
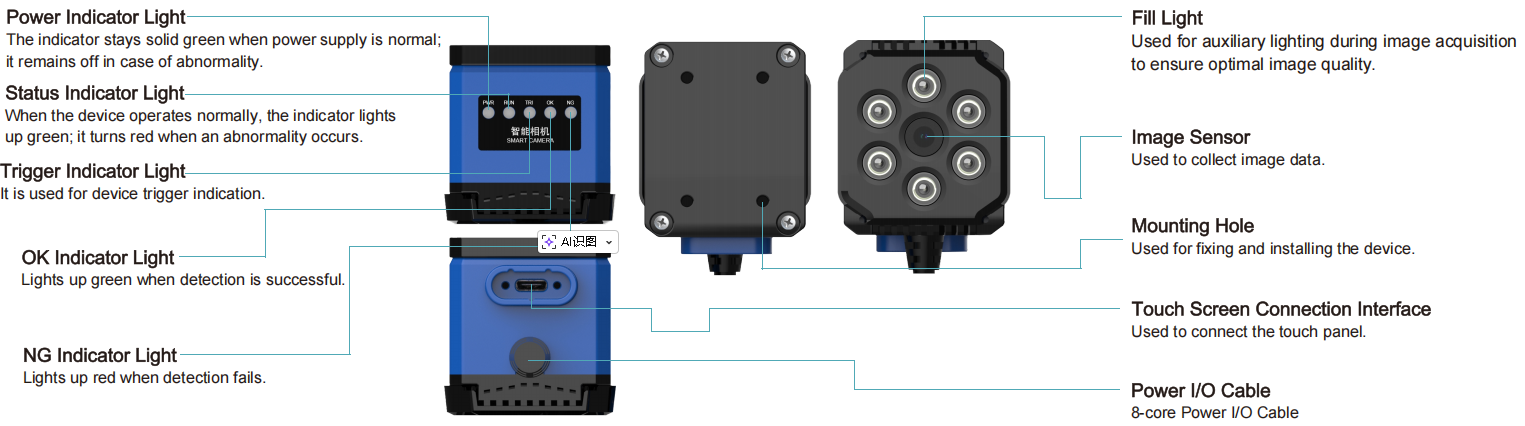
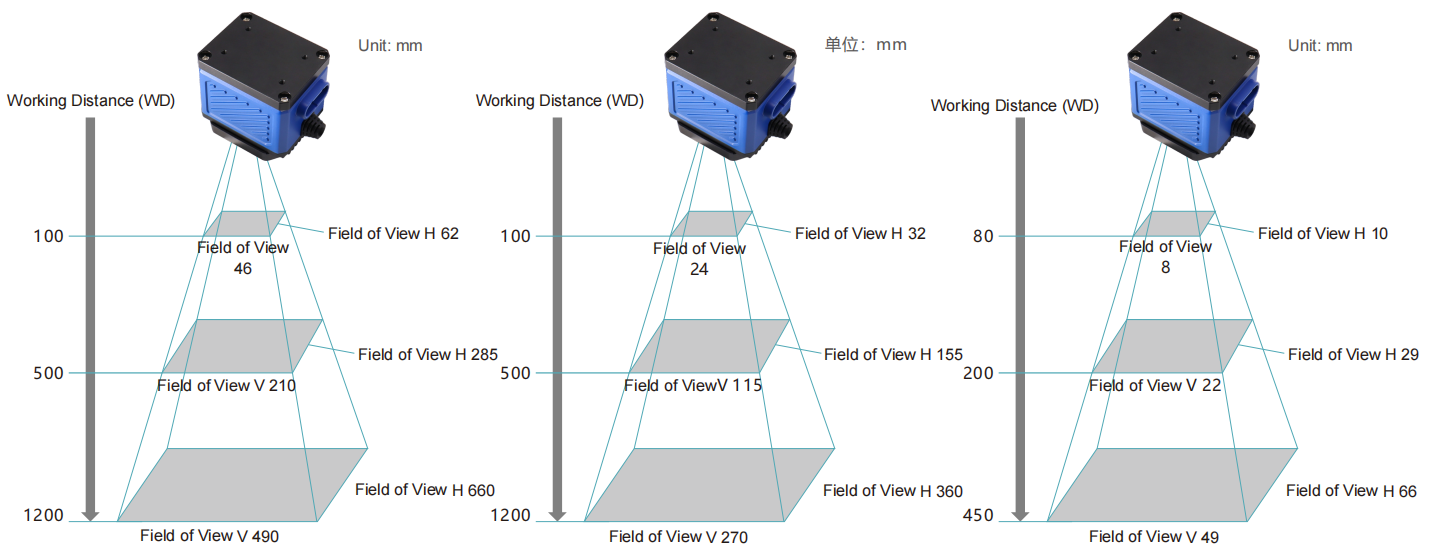
Diagramme des caractéristiques de la plage de détection
| Modèle |
Distance de montage |
Champ de visionH |
Champ de vision V |
K516-1-A1
Type à champ de vision large |
30 |
25 |
19 |
| 100 |
62 |
46 |
| 200 |
118 |
90 |
| 300 |
170 |
130 |
| 500 |
285 |
210 |
| 1200 |
660 |
490 |
| Modèle |
Distance de montage |
Champ de visionH |
Champ de vision V |
K516-1-A2
Type standard |
40 |
14 |
11 |
| 100 |
32 |
24 |
| 200 |
63 |
47 |
| 300 |
93 |
69 |
| 500 |
155 |
115 |
| 1200 |
360 |
270 |
| Modèle |
Distance de montage |
Champ de visionH |
Champ de vision V |
K516-1-A3
Type standard |
80 |
10 |
8 |
| 100 |
13 |
10 |
| 150 |
21 |
16 |
| 200 |
29 |
22 |
| 300 |
43 |
32 |
| 450 |
66 |
49 |
| Modèle |
Distance de travail |
Champ de vision H |
Champ de vision V |
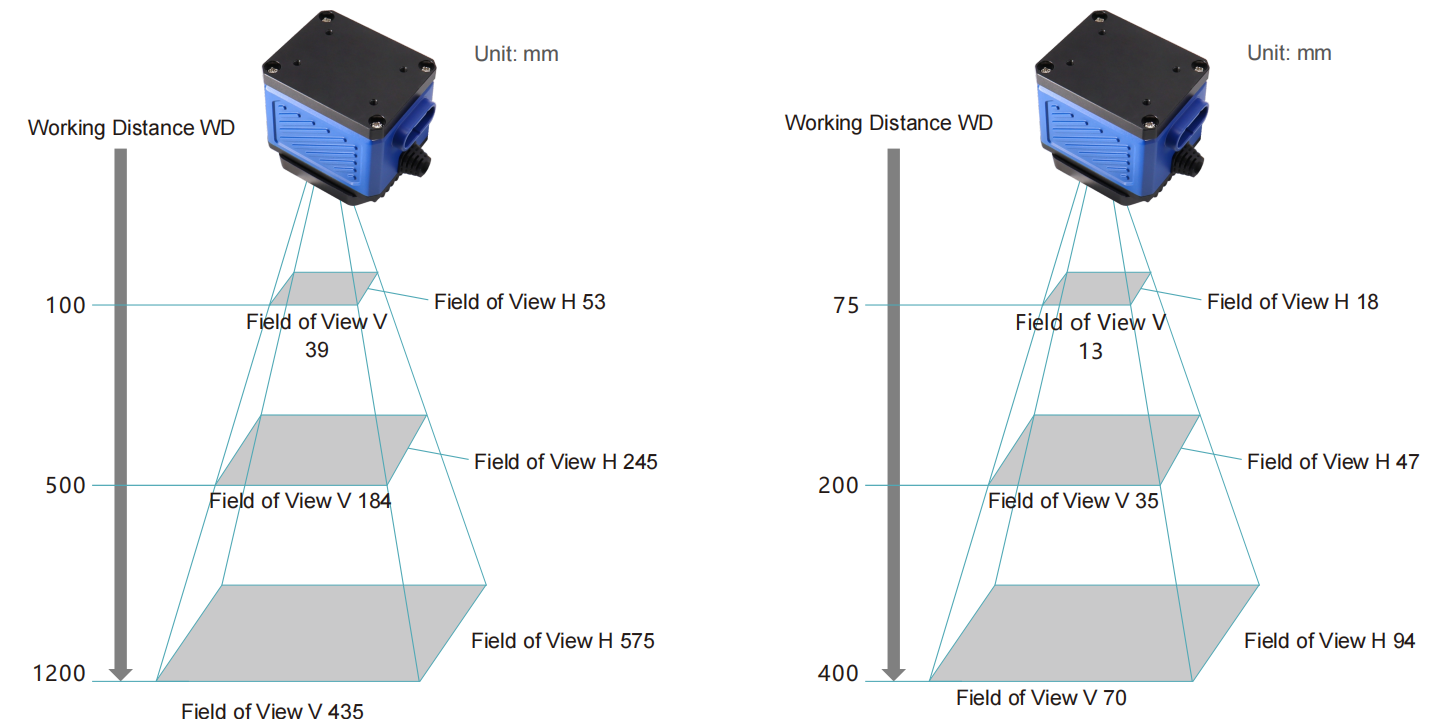
K516-1-B1
Type standard |
30 |
18 |
14 |
| 100 |
53 |
39 |
| 200 |
101 |
75 |
| 300 |
150 |
112 |
| 500 |
245 |
184 |
| 1200 |
575 |
435 |
| Modèle |
Distance de travail |
Champ de vision H |
Champ de vision V |
K516-1-B2
Type standard |
75 |
18 |
13 |
| 100 |
23 |
18 |
| 150 |
35 |
26 |
| 200 |
47 |
35 |
| 300 |
71 |
53 |
| 400 |
94 |
70 |
Outil de détection d'algorithme
Mode standard : équipé d'une variété d'outils de détection pour répondre facilement aux diverses exigences des applications.
Zone en niveaux de gris correspondant aux contours


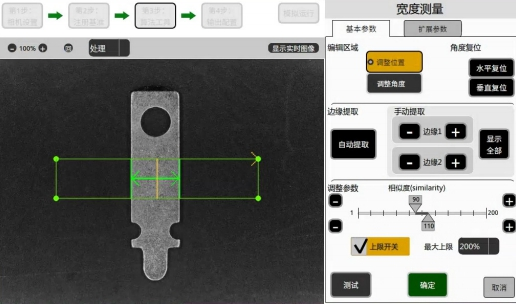
Mesure de la largeur de la zone de couleur

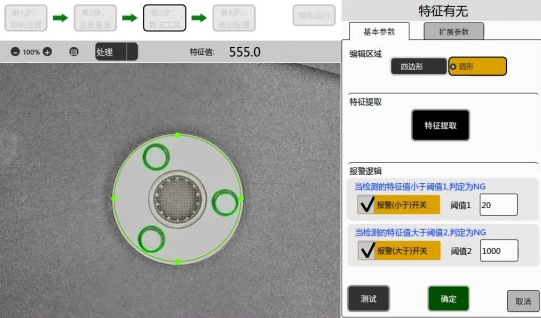
Modèle d'apprentissage Fonctionnalité Présence/Absence

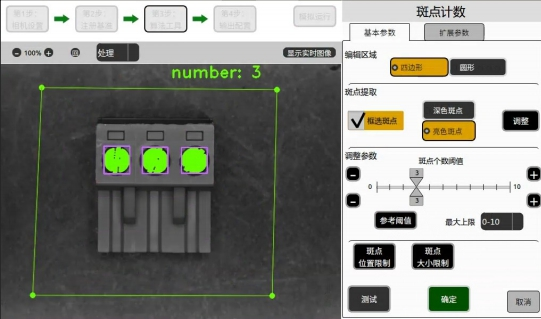
Comparaison des niveaux de gris avec comptage de gouttes
Reconnaissance de caractères de présence/absence de couleur (OCR)
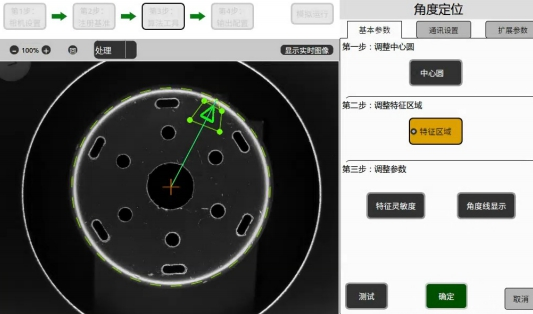
Positionnement angulaire Positionnement cible
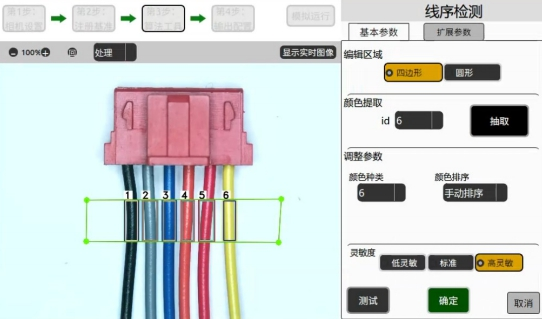
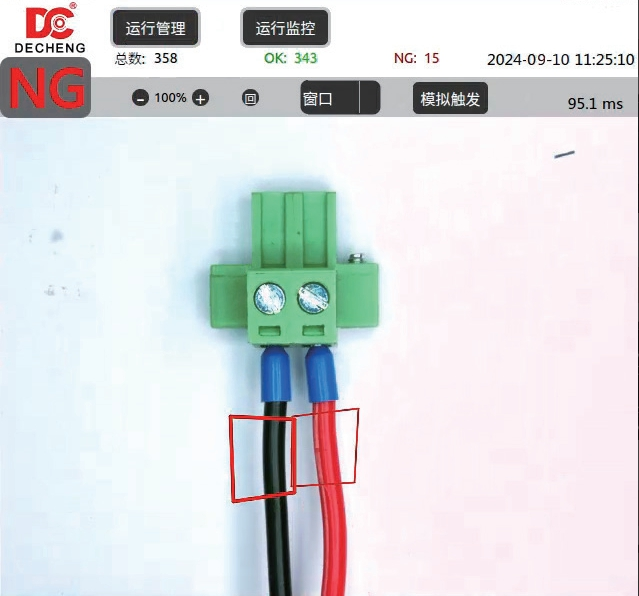
Apprentissage de l'IA pour l'inspection de la séquence de fils de lancement

Cas de candidature
Correspondance des contours : identifier par différence de forme
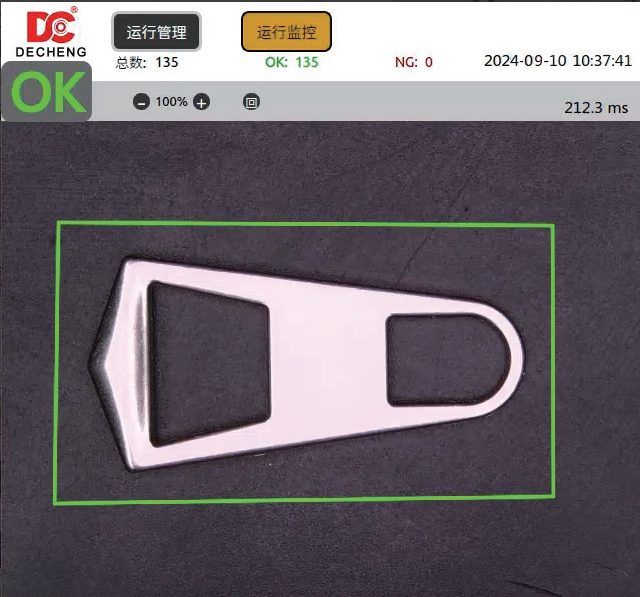
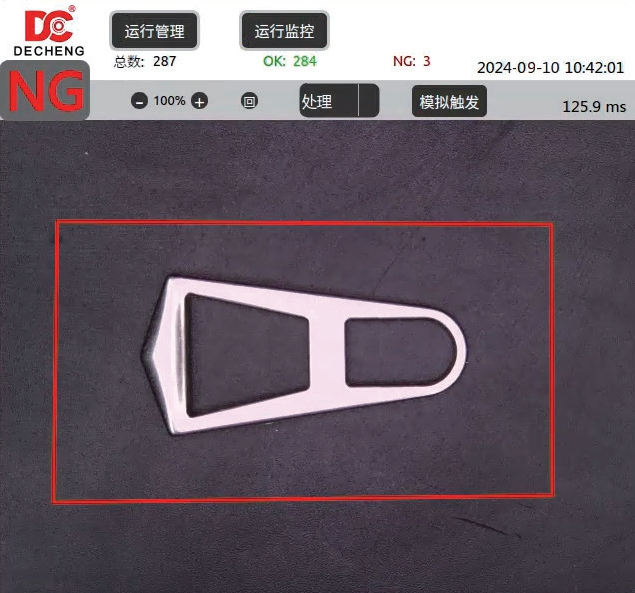
Entourez simplement la cible pour extraire automatiquement le contour. Il peut gérer les fluctuations de luminosité et les différences d’état de surface individuelles qui sont difficiles à utiliser pour les méthodes de corrélation normalisées.
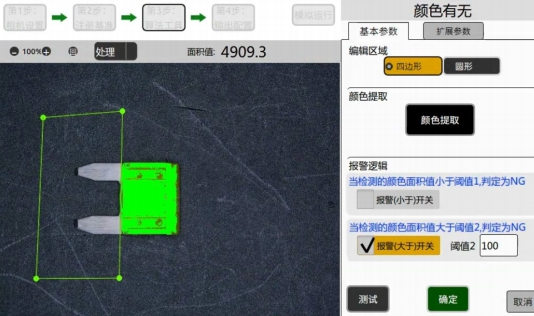
Zone de couleur : identifier par la taille de la zone de couleur

Sur la base de la zone de couleur enregistrée des produits qualifiés, la cohérence avec la cible détectée est calculée. Cliquez simplement sur la couleur cible dans l'image pour terminer l'extraction des couleurs en toute simplicité.
Présence/Absence de fonctionnalité : identifier par le nombre de pixels de bord

Il peut identifier des cibles ayant des formes non fixées ou des différences dans les conditions de surface. Edge fait référence aux points limites des changements de lumière et d’obscurité.
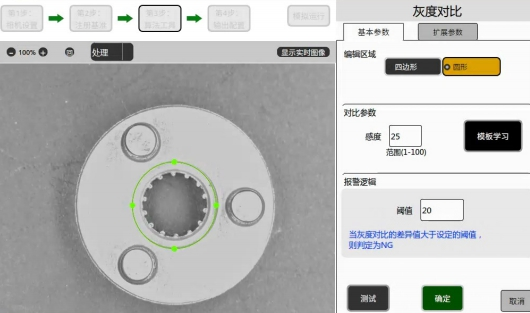
Zone en niveaux de gris : identification par niveau de luminosité spécifié


Prenez la zone de luminosité des bons produits enregistrés comme référence pour calculer la cohérence avec la cible de détection. Il convient à l'identification basée sur la différence de brillance et la différence de traitement de surface.
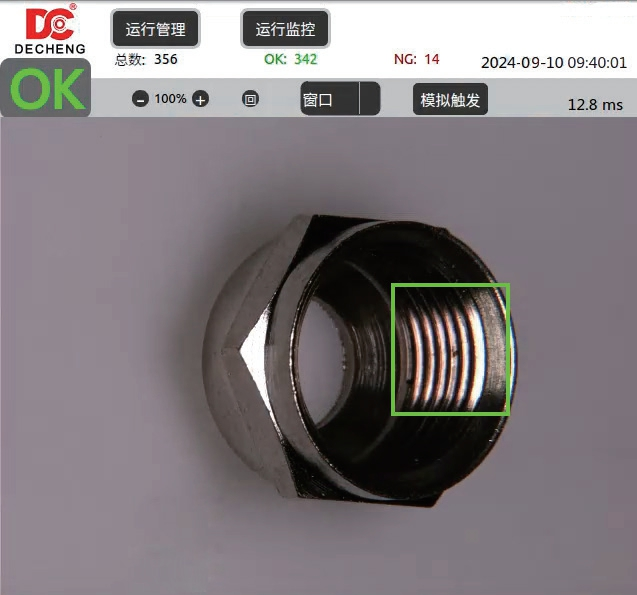
Mesure de largeur : Identification par largeur entre bords
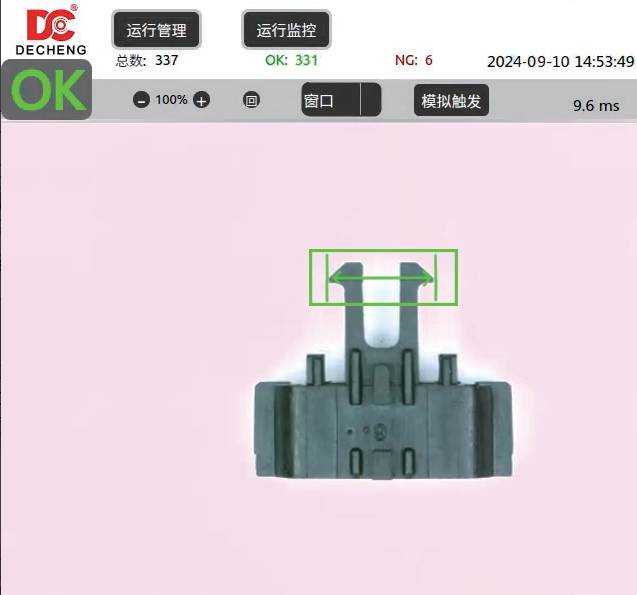
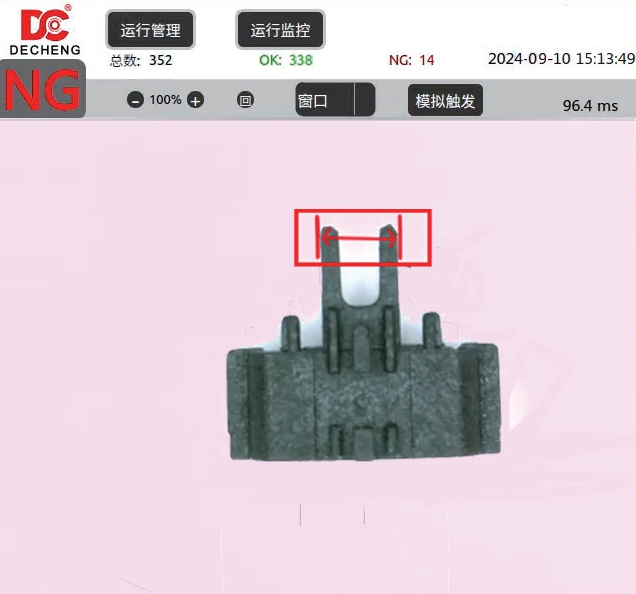
Il peut détecter la déformation ou la largeur de l'objet cible. La dimension réelle peut être affichée en utilisant la fonction de mise à l'échelle.
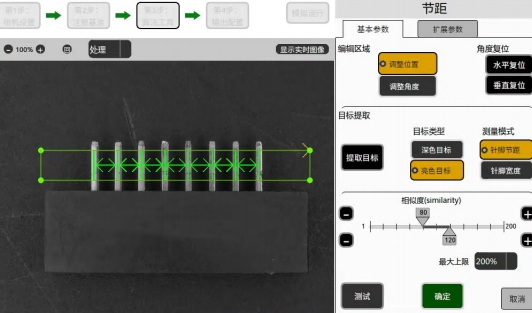
Pas : Identification par différence de pas
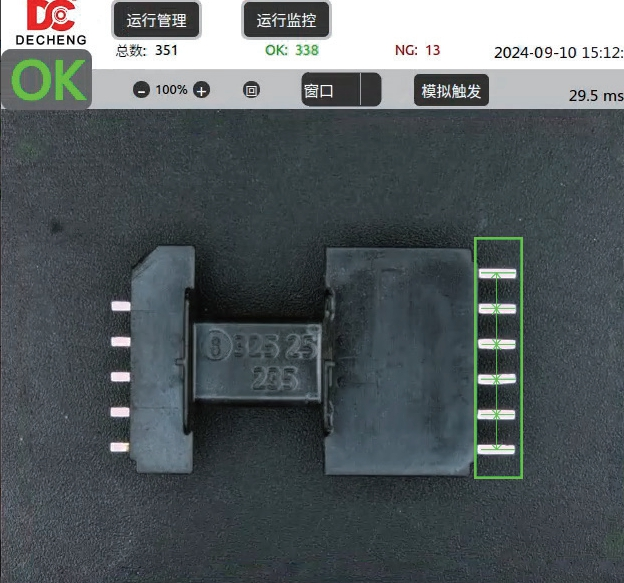
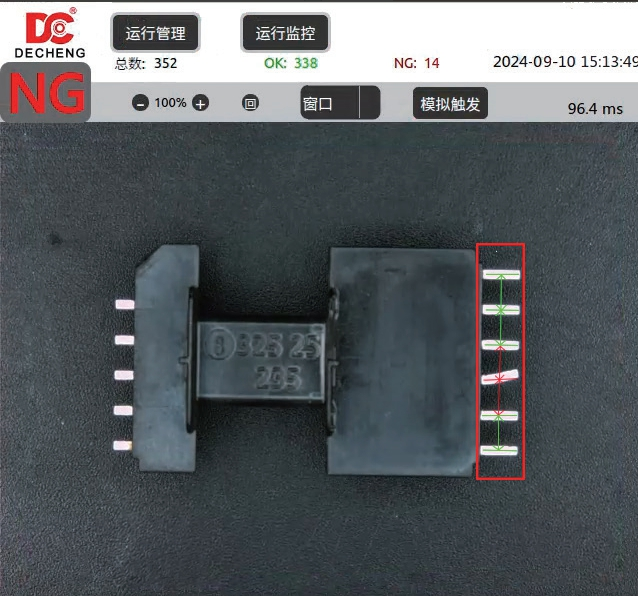
Il peut détecter non seulement le pas mais également la largeur des broches. La dimension réelle peut être affichée en utilisant la fonction de mise à l'échelle.
Positionnement angulaire : identification par désalignement angulaire et décalage


Il peut identifier le désalignement angulaire et le décalage de la cible dans la plage spécifiée.
Comptage de blobs : identifiez-vous par le nombre de blobs sur la cible

Sur la base de la quantité de blob enregistrée de produits qualifiés, il vérifie si le numéro de blob de la cible détectée est cohérent.
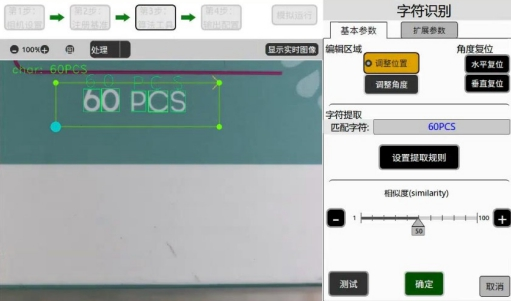
Reconnaissance de caractères : identifier par les différences de caractères, de chiffres et de dates
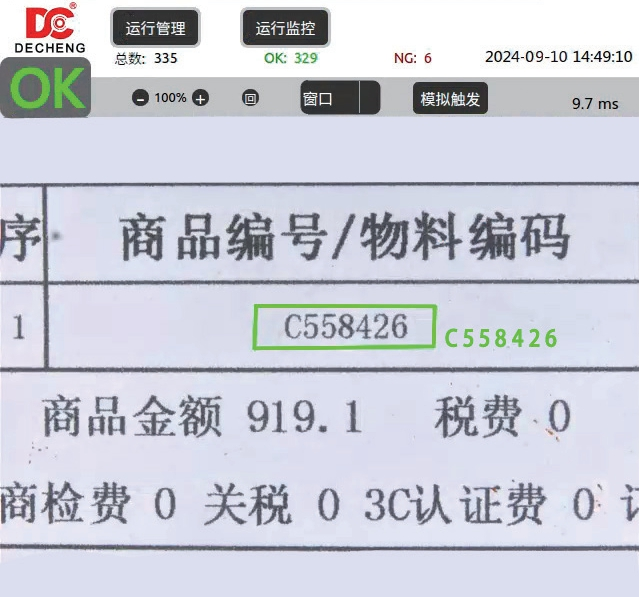

Sur la base des informations de caractère et de date enregistrées des produits qualifiés, il vérifie si les caractères et les dates de la cible détectée sont cohérents.
Installation de l'appareil
Fixez l'appareil avec des vis M3 via le support de montage et d'autres pièces mécaniques. Il prend en charge l'installation verticale et horizontale, et la méthode de montage peut être sélectionnée en fonction des scénarios d'application réels.
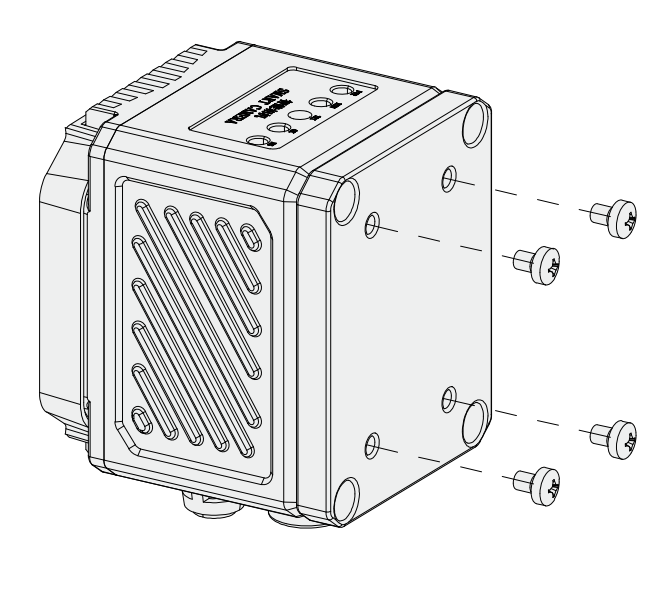
Diagramme schématique de connexion