Please Choose Your Language
cerca
Elija su sitio
Global
Redes Sociales

















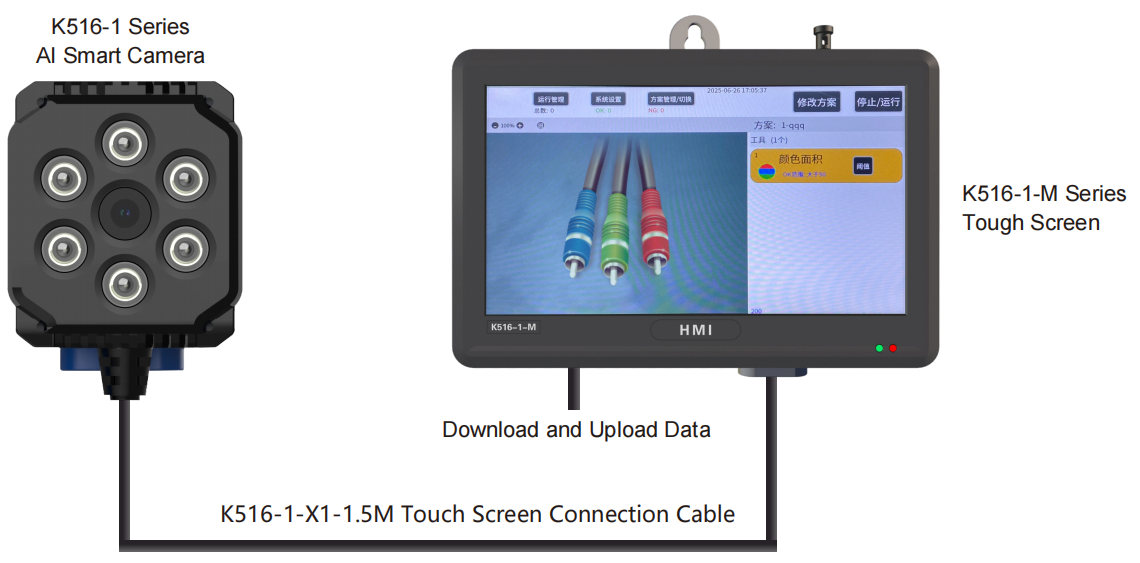
Serie K516-1
SiRON
Acerca de la selección
300.000 píxeles 1,3 megapíxeles
| Modelo | Descripción del rendimiento | Modelo | Descripción del rendimiento | |
| K516-1-A1 | Lente de 4,7 mm, color | K516-1-B1 | Lente de 8 mm, monocromática | |
| K516-1-A2 | Lente de 8 mm, color | K516-1-B2 | Lente de 16 mm, monocromática | |
| K516-1-A3 | Lente de 16 mm, color |
Accesorios

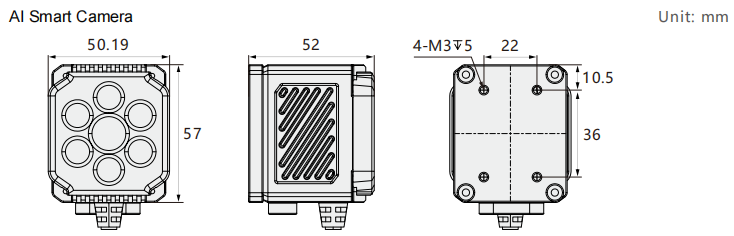
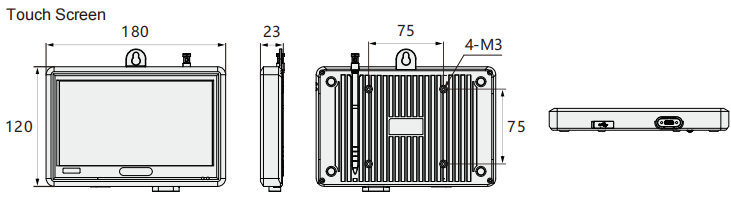
Dimensión
Descripción del cable de alimentación y E/S 8P
| Descripción de la interfaz de señal | |||
| Pin No. | Color | Nombre | Descripción |
| Pin 1 | Rojo | DC24 | Fuente de alimentación positiva |
| Pin 2 | Negro | 0V/COM | Fuente de alimentación negativa/terminal común de E/S |
| Patilla 3 | Verde | EN1 | Entrada de disparador de cámara |
| clavija 4 | Naranja | SALIDA1 | Salida 1 |
| Patilla 5 | Amarillo | OUT2 | Salida 2 |
| clavija 6 | Marrón | OUT3 | Salida 3 |
| Patilla 7 | Azul | RS232RXD | Recibir datos |
| Patilla 8 | Gris | RS232_TXD | Transmitir datos |
Especificaciones (cámara inteligente AI)
| Modelo | K516-1-A1 | K516-1-A2 | K516-1-A3 | K516-1-B1 | K516-1-B2 |
| Resolución | 640x⁴80 | 1280x960 | |||
| Píxel | 300.000 píxeles | 1,3 megapíxeles | |||
| Velocidad de fotogramas máxima | 60 fps | 60 fps | |||
| Lente | 4,7 mm | 8mm | 16mm | 8mm | 16mm |
| Tamaño de píxel | 3.744x3.744 | 3.744x3.744 | 3.744x3.744 | 3.744x3.744 | 3.744x3.744 |
| Reconocimiento de imagen | Color | Color | Color | Monocromo | Monocromo |
| Arquitectura del sistema | Procesador ARM de cuatro núcleos a 2 GHz | ||||
| Memoria | 2GBDDR4 | ||||
| Almacenamiento | EMMC de 32GB | ||||
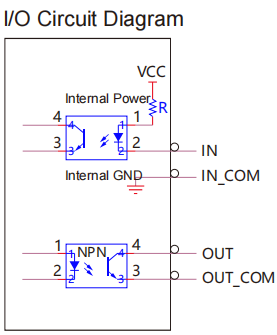
| E/S digitales | Interfaz de E/S digitales; Entrada GPI optoaislada de 1 canal, salida GPO optoaislada de 3 canales, puerto serie RS232 de 1 canal | ||||
| Salida de vídeo | Interfaz LVDS | ||||
| USB | USB 2.0 de 1 canal | ||||
| Fuente de alimentación | CC 24 V | ||||
| Consumo de energía | 12W | ||||
| Interfaz de lente | Enfoque mecánico M12 | ||||
| fuente de luz | Fuente de luz blanca | ||||
| indicador LED | Encendido/Ejecutar/Disparador/OK/NG | ||||
| Función de algoritmo | Algoritmo de visión incorporado con aprendizaje Modelo-A; Admite detección de dirección de avance/retroceso, presencia/ausencia, dimensión, posición y reconocimiento de color. | ||||
| Material de la carcasa | Aleación de aluminio | ||||
| Grado de protección | IP67 | ||||
| Temperatura ambiente | 0-50℃ | ||||
| Humedad ambiental | 2 0 % ~ 9 5 % PH Sin condensación | ||||
| Longitud estándar del cable de alimentación y E/S | 3m | ||||
Parámetros de especificación (panel táctil)
| Modelo | K516-1-M |
| Tamaño del panel | 7 pulgadas |
| Resolución | 1024X600 |
| Luz indicadora | PWR / Lámpara de pantalla táctil |
| Interfaz | LVDS/USB |
| Modo táctil | Resistador |
| Volaje | CC 12 V |
| Fuerza | 5W |
| Grado de protección | IP40 |
| Temperatura ambiente | 0~50℃ |
| Humedad ambiental | 20%~95% HR, sin condensación |
| Tamaño de apertura | 260,2 mm x 179,8 mm |
| Peso | 450g |
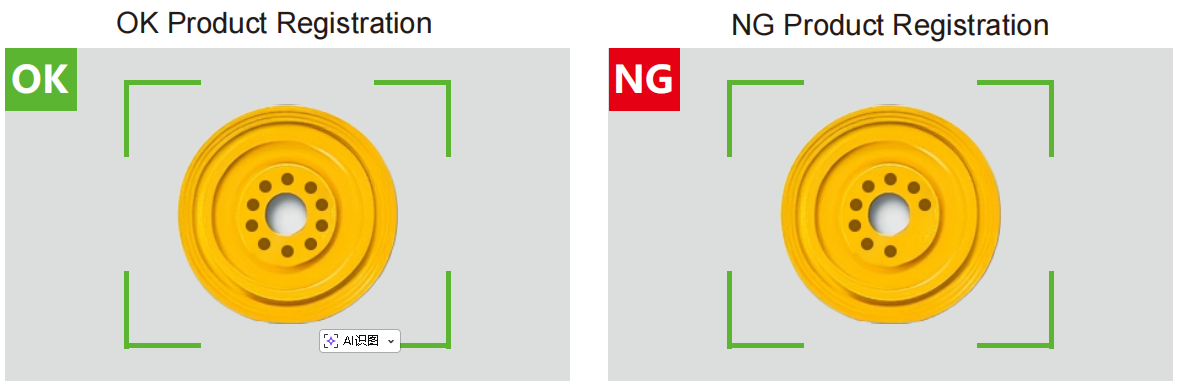
Referencia de registro
Registre únicamente productos OK y productos NG y el sistema podrá ajustarse automáticamente a la configuración ideal. Incluso si se producen cambios en las piezas de trabajo y en el entorno, sólo es necesario registrar nuevas piezas de trabajo adicionalmente. El sistema agregará automáticamente condiciones de detección, sin configuración complicada ni ajustes de instalación.
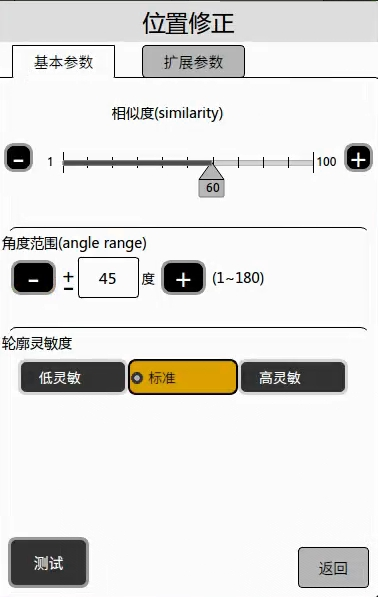
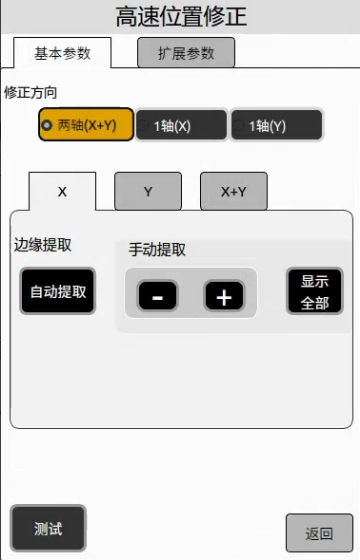
Corrección de posición: corrija la posición del producto haciendo coincidir el contorno. Corrección de posición de alta velocidad: corrija el producto en las direcciones X e Y buscando características de destino en blanco y negro.
Detalles del producto



Dibujo de estructura
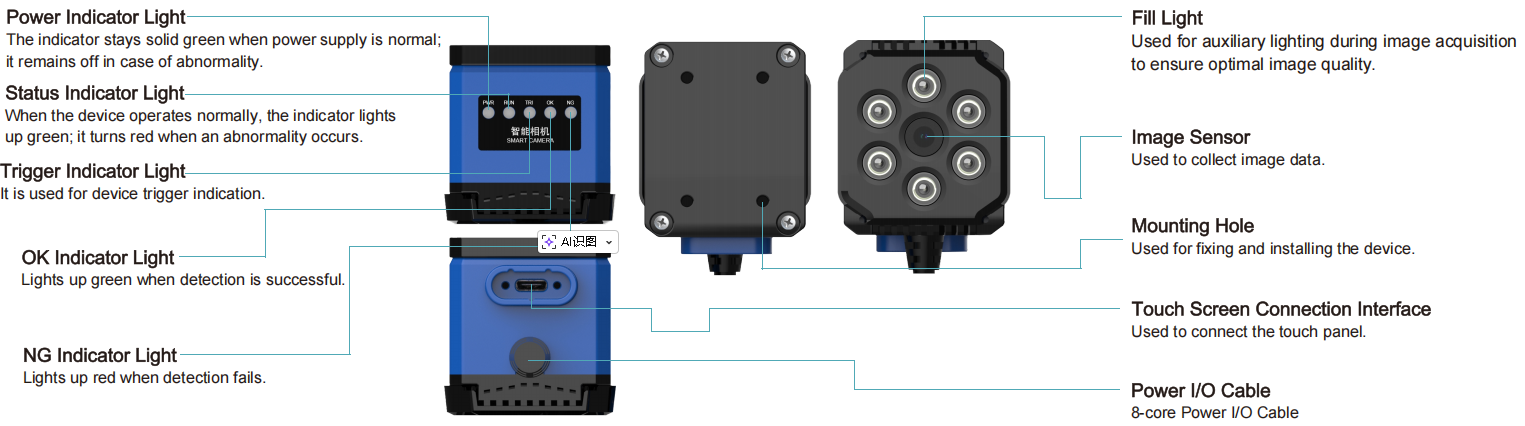
Diagrama de características del rango de detección
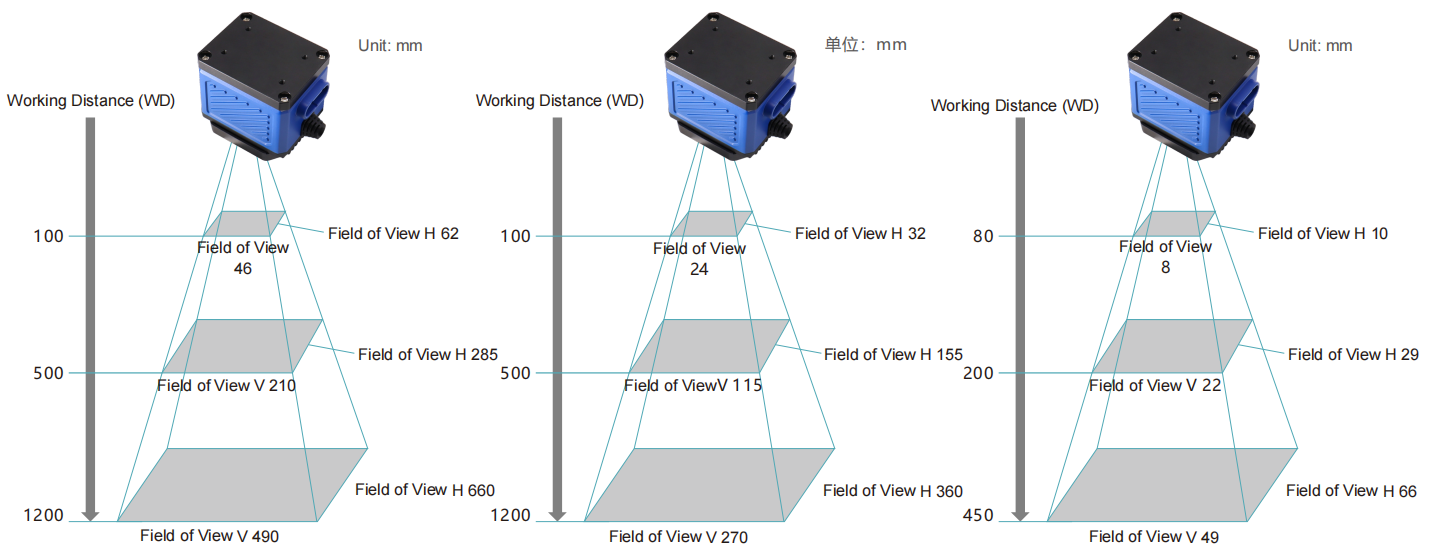
| Modelo | Distancia de montaje | Campo de visiónH | Campo de visión V | |
| K516-1-A1 Tipo de campo de visión amplio |
30 | 25 | 19 | |
| 100 | 62 | 46 | ||
| 200 | 118 | 90 | ||
| 300 | 170 | 130 | ||
| 500 | 285 | 210 | ||
| 1200 | 660 | 490 | ||
| Modelo | Distancia de montaje | Campo de visiónH | Campo de visión V | |
| K516-1-A2 Tipo estándar |
40 | 14 | 11 | |
| 100 | 32 | 24 | ||
| 200 | 63 | 47 | ||
| 300 | 93 | 69 | ||
| 500 | 155 | 115 | ||
| 1200 | 360 | 270 | ||
| Modelo | Distancia de montaje | Campo de visiónH | Campo de visión V | |
| K516-1-A3 Tipo estándar |
80 | 10 | 8 | |
| 100 | 13 | 10 | ||
| 150 | 21 | 16 | ||
| 200 | 29 | 22 | ||
| 300 | 43 | 32 | ||
| 450 | 66 | 49 | ||
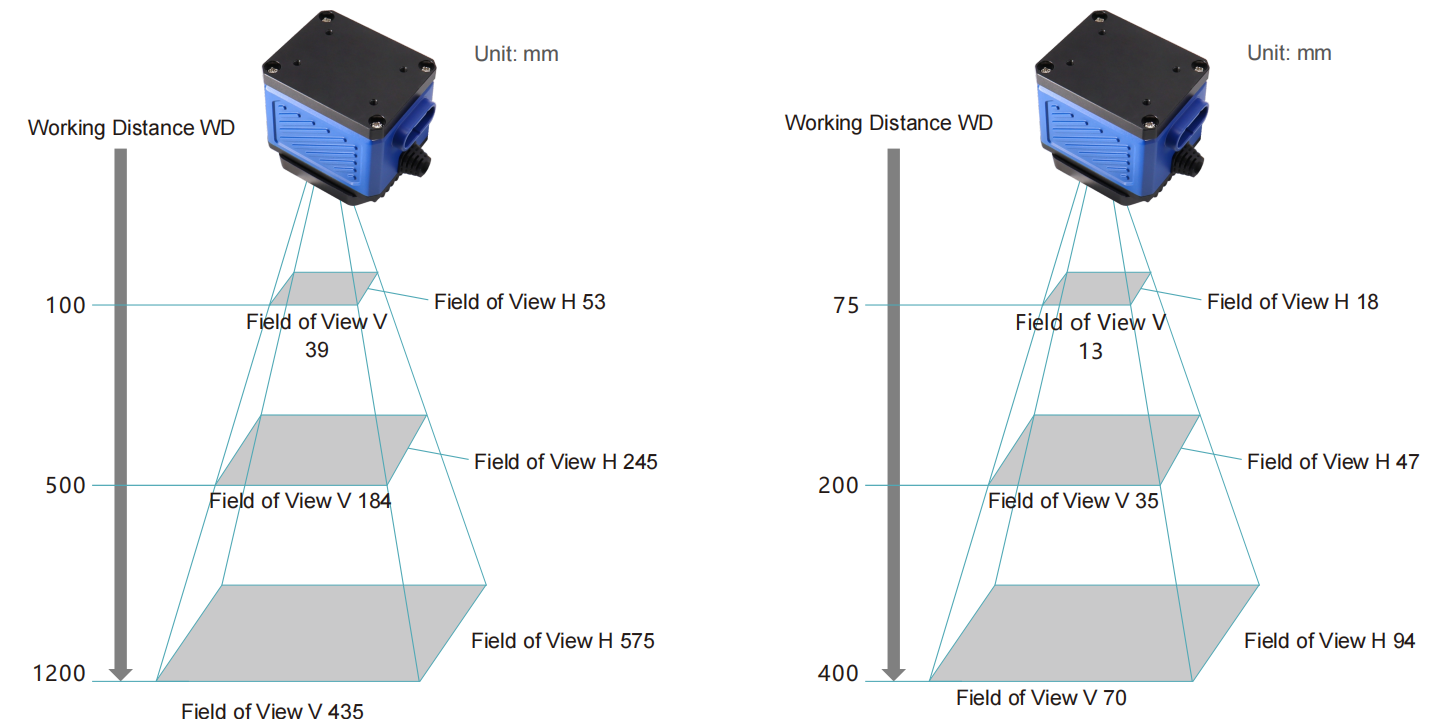
| Modelo | Distancia de trabajo | Campo de visión H | Campo de visión V |
| K516-1-B1 Tipo estándar |
30 | 18 | 14 |
| 100 | 53 | 39 | |
| 200 | 101 | 75 | |
| 300 | 150 | 112 | |
| 500 | 245 | 184 | |
| 1200 | 575 | 435 |
| Modelo | Distancia de trabajo | Campo de visión H | Campo de visión V |
| K516-1-B2 Tipo estándar |
75 | 18 | 13 |
| 100 | 23 | 18 | |
| 150 | 35 | 26 | |
| 200 | 47 | 35 | |
| 300 | 71 | 53 | |
| 400 | 94 | 70 |
Herramienta de detección de algoritmos
Modo estándar: Equipado con una variedad de herramientas de detección para cumplir fácilmente con diversos requisitos de aplicaciones.
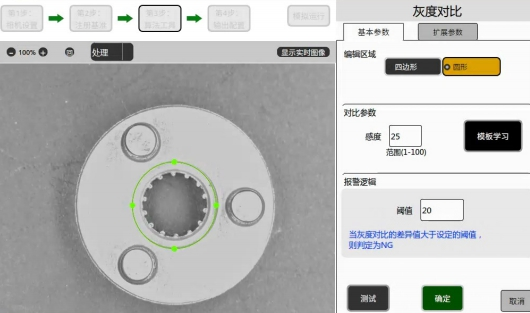
Área de escala de grises que coincide con el contorno


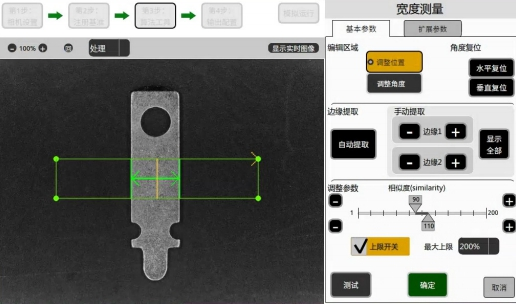
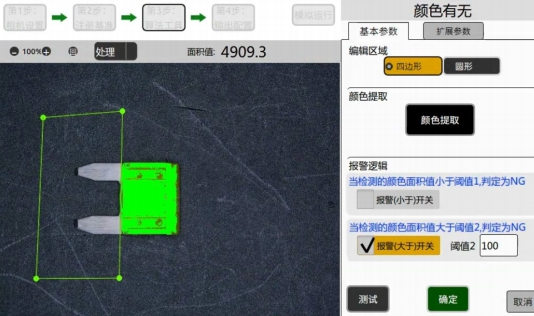
Medición del ancho del área de color

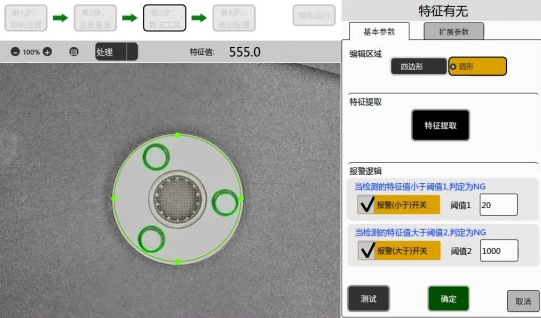
Presencia/ausencia de función de aprendizaje de plantilla

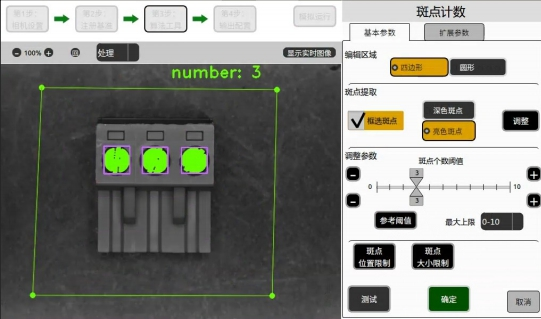
Comparación en escala de grises con conteo de manchas
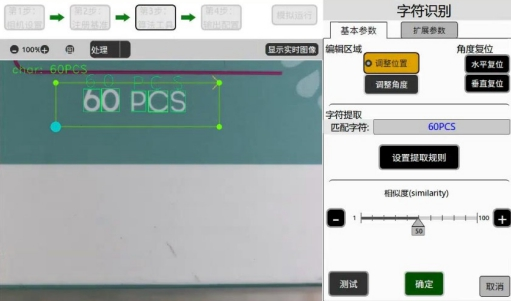
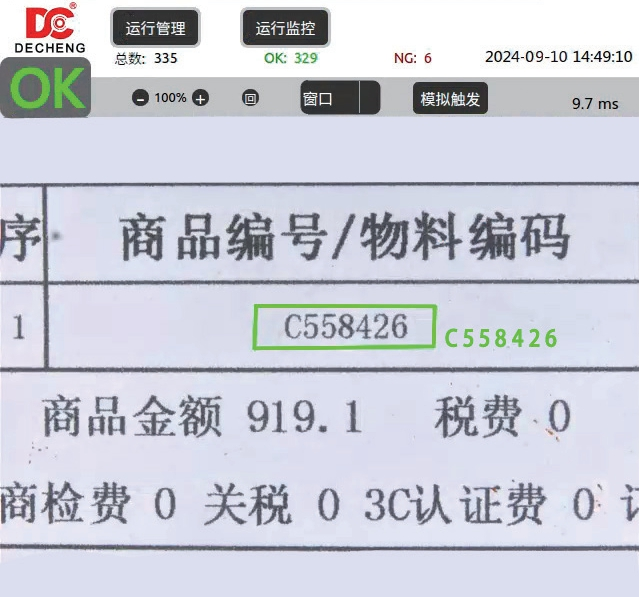
Reconocimiento de caracteres de presencia/ausencia de color (OCR)
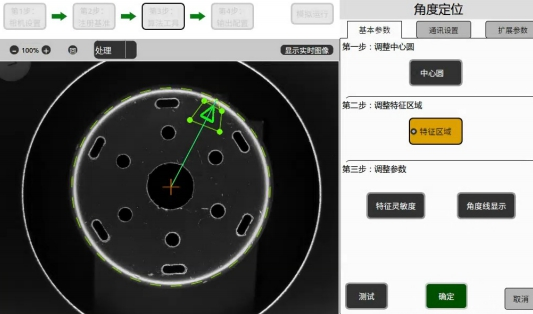
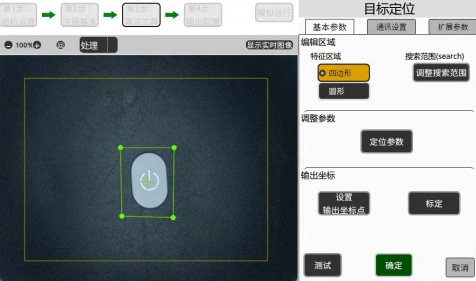
Posicionamiento del ángulo Posicionamiento del objetivo
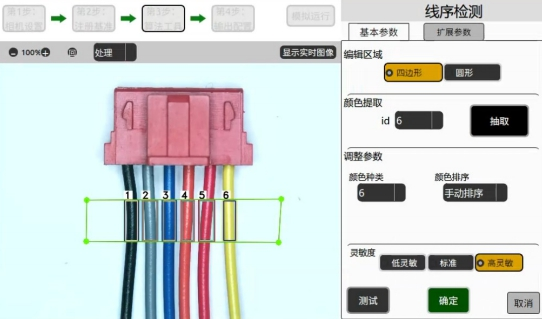
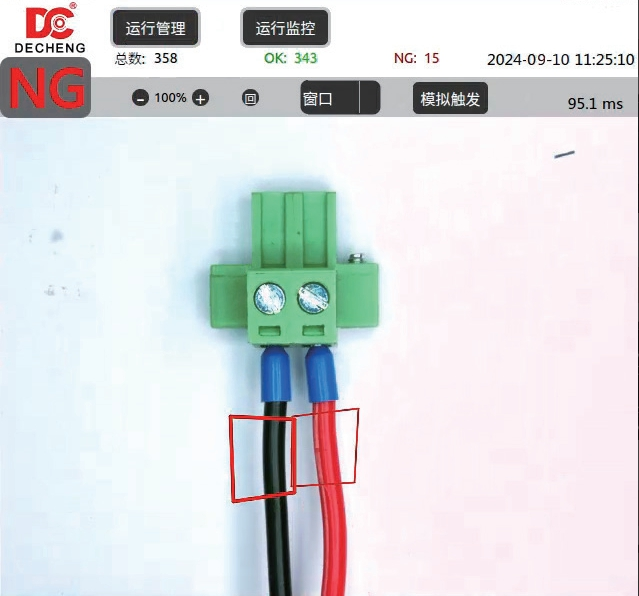
Aprendizaje de IA de inspección de secuencia de cables de paso

Casos de aplicación
Coincidencia de contornos: identificar por diferencia de forma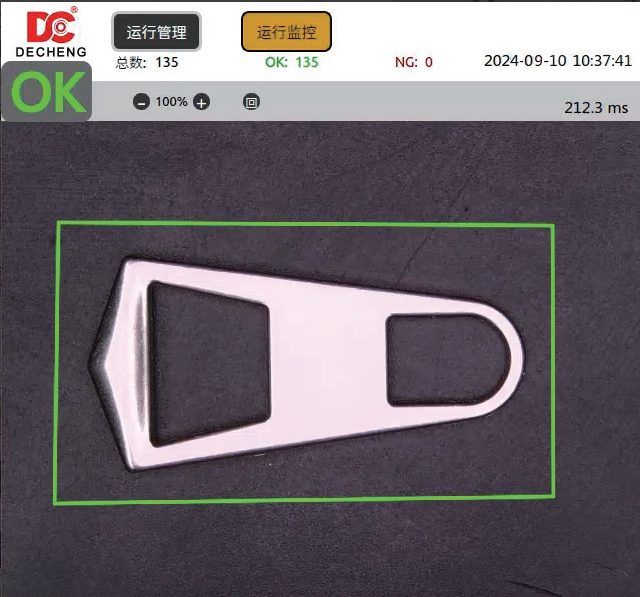
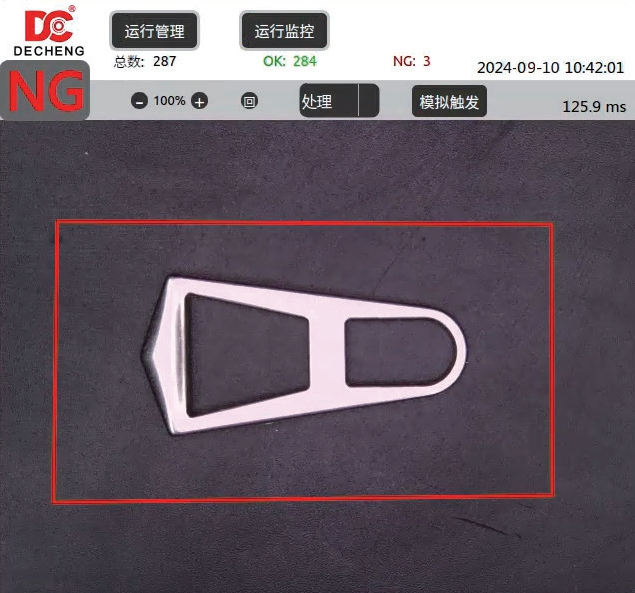
Simplemente incluya el objetivo para extraer automáticamente el contorno. Puede manejar fluctuaciones de brillo y diferencias en las condiciones de las superficies individuales que son difíciles para los métodos de correlación normalizados.
Área de color: identificar por tamaño del área de color

Según el área de color registrada de los productos calificados, se calcula la coherencia con el objetivo detectado. Simplemente haga clic en el color de destino en la imagen para completar la extracción del color con una operación sencilla.
Presencia/ausencia de funciones: identificar por el recuento de píxeles del borde

Puede identificar objetivos con formas no fijadas o diferencias en las condiciones de la superficie. Borde se refiere a los puntos límite de los cambios de luz y oscuridad.
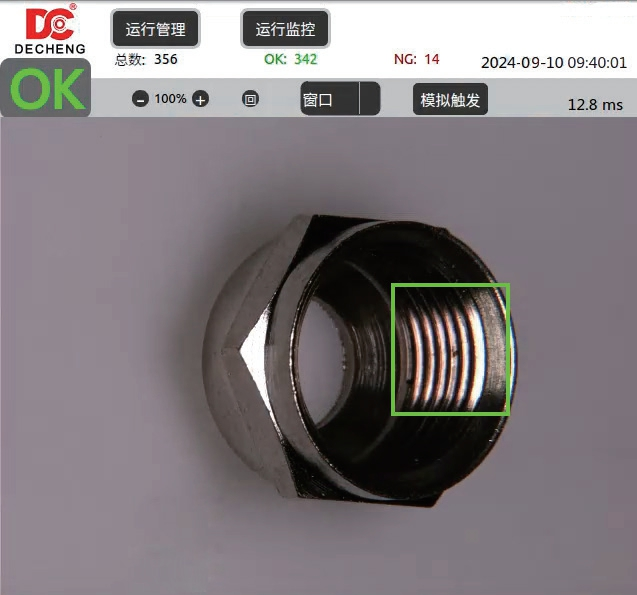
Área de escala de grises: identificación por nivel de brillo especificado


Tome el área de brillo de los buenos productos registrados como punto de referencia para calcular la coherencia con el objetivo de detección. Es adecuado para la identificación basada en la diferencia de brillo y la diferencia en el procesamiento de la superficie.
Medida de Ancho: Identificación por ancho entre bordes
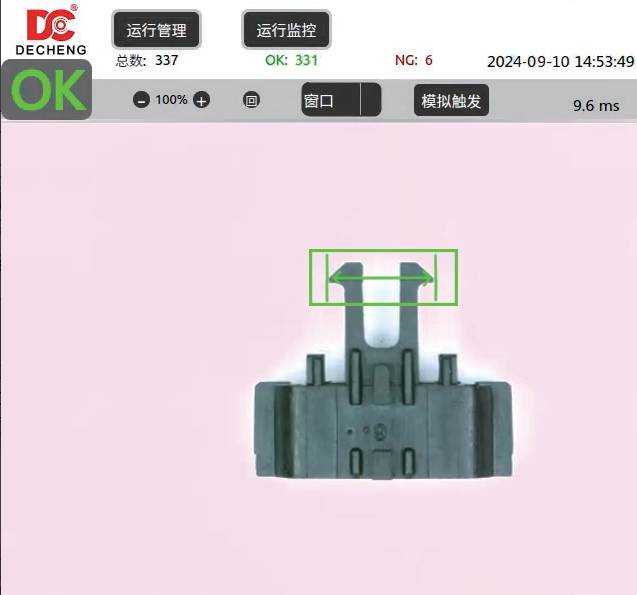
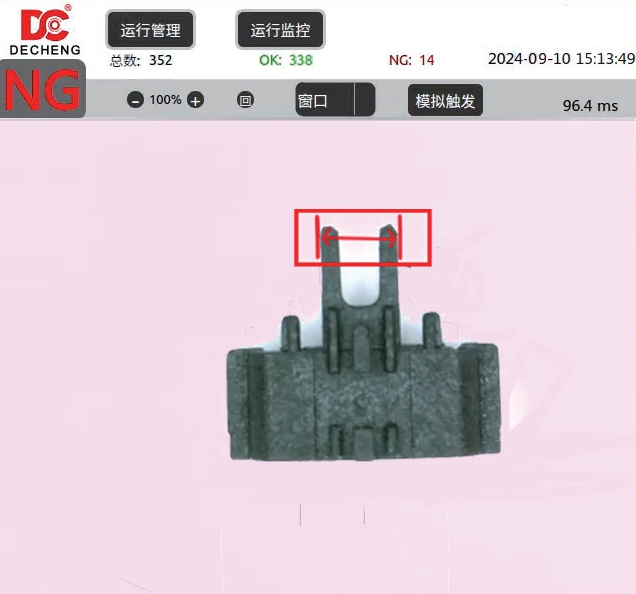
Puede detectar deformación o ancho del objeto objetivo. La dimensión real se puede mostrar utilizando la función de escala.
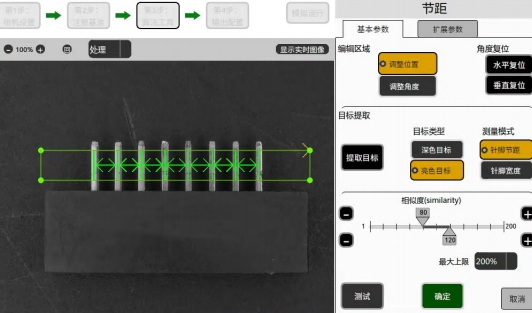
Tono: Identificación por diferencia de tono
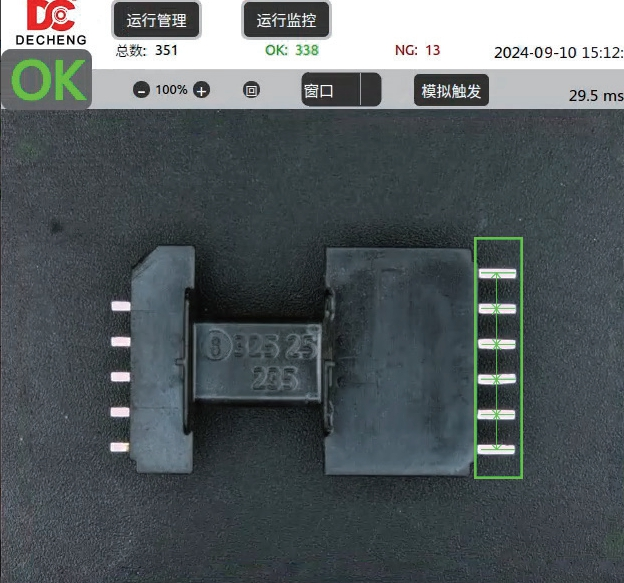
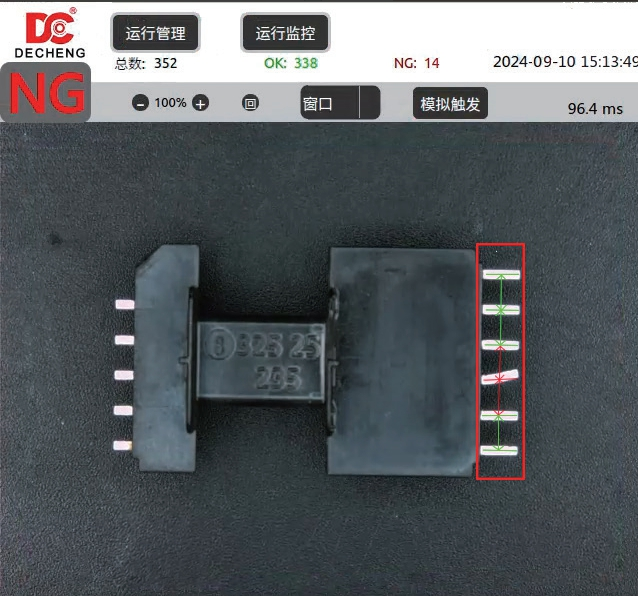
Puede detectar no sólo el paso sino también el ancho del pasador. La dimensión real se puede mostrar utilizando la función de escala.
Posicionamiento de ángulo: identificar por desalineación y compensación angular


Puede identificar la desalineación angular y el desplazamiento del objetivo dentro del rango especificado.
Conteo de blobs: Identifique por el número de blobs en el objetivo

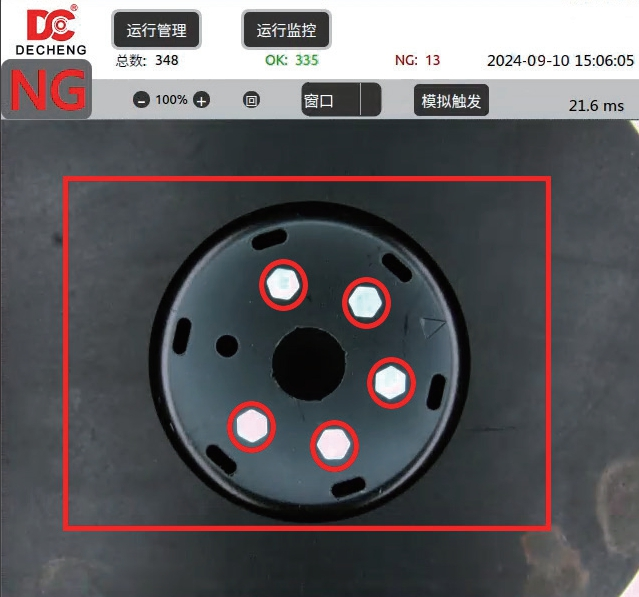
Según la cantidad de blobs registrada de productos calificados, verifica si el número de blobs del objetivo detectado es consistente.
Reconocimiento de caracteres: identificar por diferencias en caracteres, números y fechas.

Instalación del dispositivo
Fije el dispositivo con tornillos M3 a través del soporte de montaje y otras piezas mecánicas. Admite instalación vertical y horizontal, y el método de montaje se puede seleccionar de acuerdo con los escenarios de aplicación reales.
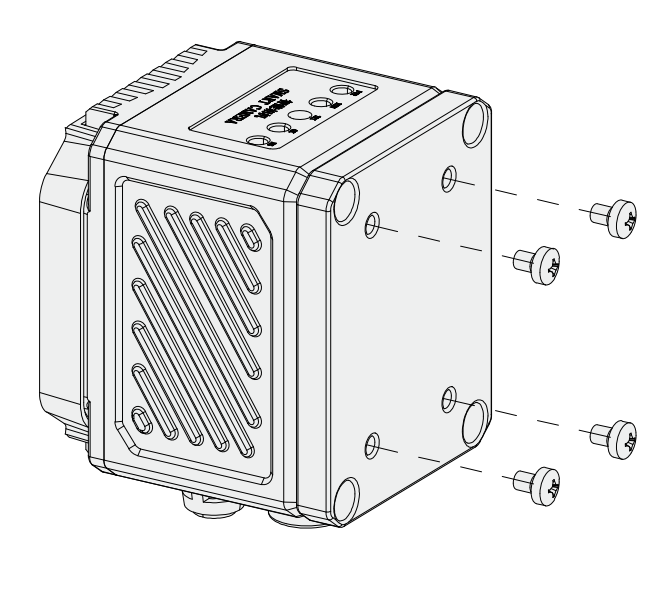
Diagrama esquemático de conexión