Please Choose Your Language
닫다
귀하의 사이트를 선택하세요
글로벌
소셜 미디어



| 수량: | |
|---|---|
|
PDF 내보내기 |
|








M216E
사이론
8503009090
선택에 대해
![]()
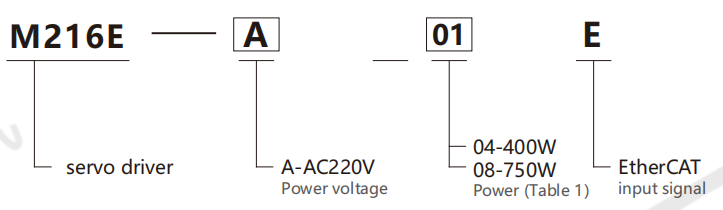
선택 예: M216E-A01E는 M216E 시리즈 서보 드라이버를 나타내며, 전원 전압은 AC220V, 전력은 100W, 입력 신호는 EtherCAT입니다.
참고: 1. 전원 전압 AC220V: 전력 선택 범위는 100~1000W입니다. M216E 시리즈 서보 드라이버는 M206 시리즈 서보 모터와 일치할 수 있습니다.
표 1: 전력
| 전압 | 교류 220V | |||||
| 암호 | 01 | 02 | 04 | 06 | 08 | 10 |
| 힘 | 100W | 200W | 400W | 600W | 750W | 1000W |
사양
| 이름 | M216E 시리즈 서보 드라이브 | |
| E therCAT 통신 사양 | 통신 커넥터 |
RJ45×2(입력:CN6A;출력:CN6B |
| 네트워크 아키텍처 | 직렬로 연결하다 | |
전송 속도 |
2x100Mbps(전이중) | |
| 데이터 프레임 길이 | 최대값은 1484바이트입니다. | |
| 애플리케이션 계층 프로토콜 | CoE:EtherCAT을 통한 CANopen | |
| 동기 모드 | DC 동기 모드(SYNCO)비동기 모드(FreeRun) | |
| 통신 수신자 | SDO: 비주기적 데이터 객체, PDO: 주기적 데이터 객체, EMCY: 긴급 객체 | |
| 애플리케이션 계층 사양 | CiA402 드라이브 프로필 | |
| 지원되는 제어 모드 | CSP:주기 동기 위치 모드 CSV:주기 동기 속도 모드 CST:주기 동기 토크 모드 PP:윤곽 위치 모드 PV: 윤곽 속도 모드 PT: 윤곽 토크 모드 HM: 원점 회귀 모드 |
|
| 입력 전원 | 단상 220VAC | |
| 입력 전원 | 단상 220VAC |
|
| 온도 | 0~45℃ | |
| 습기 | 90%RH 이하에서는 결로 현상이 관찰되지 않습니다. | |
| 고도 | 고도 ≤1000m | |
| 설치환경 | 부식성 가스, 인화성 가스, 오일 미스트, 먼지 등이 없을 것 | |
| 설치 | 수직 설치 | |
| 인코더 | 17비트 증분/절대값 인코더 지원 | |
| 출력 전력 | 24V 전압 출력 | 100mA, DI 포트에 전원을 공급할 수 있습니다. |
| 제어 신호 | 디지털 입력 | 구성 가능한 기능을 갖춘 일반 디지털 입력 5채널. |
| 디지털 출력 | 구성 가능한 기능을 갖춘 3개의 디지털 출력 채널. | |
| 통신 기능 | EtherCAT 통신, Modbus RTU 프로토콜. | |
| 디스플레이 패널 및 키 조작 | 5개의 버튼(모드, 설정, 왼쪽, 위, 아래) 및 6개의 디지털 튜브 | |
| 회생 방전 제동 저항기 | 50W40Ω 제동 저항기가 내장되어 있습니다. 빈번한 제동 상황에서는 외부 제동 저항기를 연결해야 합니다. |
|
애플리케이션
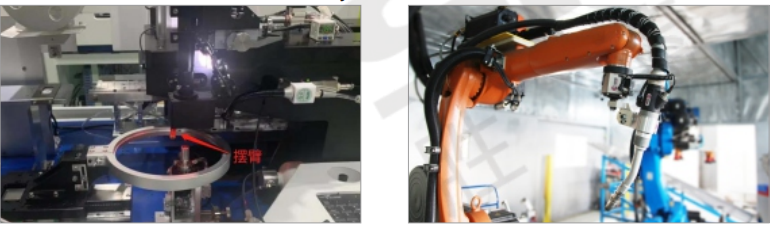
반도체 산업의 응용
기계 팔에 적용
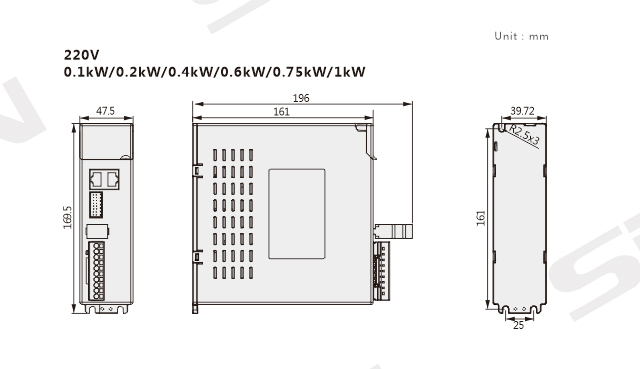
외형도