Sobre a seleção
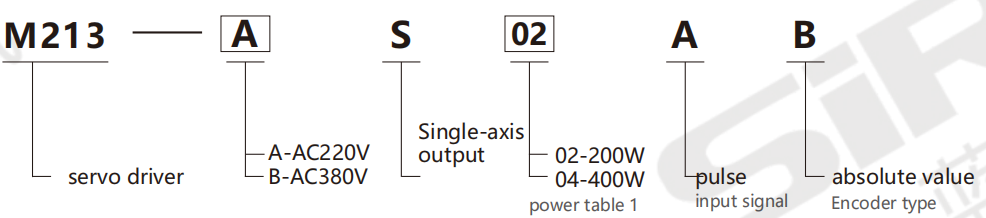
Exemplo de seleção: M213-AS02AB representa o servo driver da série M213, com tensão de alimentação de AC220V, modo de saída de eixo único, potência de 200W, sinal de entrada de pulso e tipo de codificador de valor absoluto.
Nota: 1. Tensão de alimentação AC220V: A faixa selecionável de potência é de 200 a 5000W. Tensão de alimentação AC380V: faixa selecionável de potência 1800-7500W. Os servo-drives da série M213 podem ser combinados com os servomotores das séries M203 e M205.
Tabela 1: Potência
| Tensão |
CA 220V |
| Código |
02 |
04 |
08 |
15 |
22 |
30 |
50 |
| Poder |
200W |
400W |
750W |
1500 W |
2200 W |
3000W |
5000W |
| Corrente nominal |
2A |
2,8A |
5,5A |
10A |
12A |
16A |
25A |
| Tensão |
CA 380 V |
| Código |
15 |
25 |
35 |
55 |
75 |
| Poder |
1800W |
3000W |
3800W |
5500 W |
7500 W |
| Corrente nominal |
5A |
8A |
12A |
16A |
20A |
Especificação
| Nome |
Servo acionamento série M213 |
| Iudutpower |
Método de controle |
Conversor PWM trifásico com acionamento de onda senoidal |
Fonte de alimentação do circuito principal |
220 VCA trifásico/380 VCA trifásico (-15 a +10%, 50 a 60 Hz) |
Poder de controle |
220 V trifásico: 220 VCA monofásico (-15 a + 10%, 50 a 60 Hz); 380 V trifásico: Nenhum |
Corrente nominal |
220 V |
0,2 kW/2 A, 0,4 kW/2,8 A, 0,75 kW/5,5 A, 1,5 kW/10 A, 2,2 kW/12 A,
3 kW/16 A, 5 kW/25 A |
| 380 V |
1,8 kW/5 A, 3 kW/8 A, 3,8 kW/12 A, 5,5 kW/16 A,
7,5 kW/20 A |
| Feedback do codificador |
codificador absoluto |
| Temperaturaeumidadeambiente |
Use a temperatura ambiente |
0~45℃ |
Temperatura de armazenamento |
-20~65°C |
Use a umidade do ambiente |
Abaixo de 20 a 85% UR (sem condensação) |
| Umidade do ambiente de armazenamento |
Abaixo de 20 a 85% UR (sem condensação) |
| Use para preservar o ar ambiente |
Interior (sem luz solar direta), livre de gases corrosivos, gases inflamáveis, névoas de óleo e poeira |
| Altitude |
Abaixo de 1.000 metros de altitude |
| Vibração |
Abaixo de 5,8 m/s 2 (0,6 G), 10 ~ 60 Hz (não pode ser usado continuamente em frequência ressonante) |
| tensão suportável de isolamento |
Entre iniciante e FG, AC1500V por 1 minuto |
| Introdução à função |
Entrada I0 |
4 Inpt (solação do optoacoplador DC24V) pode selecionar funções de entrada de acordo com os parâmetros de áudio servo ON, Paction, rotação para frente proibida, rotação reversa proibida,
redefinição de alarme, limite de torque de rotação para frente Limite de torque de rotação reversa, comutação de modo de controle, posição zero fixa, zeramento de desvio, comutação de velocidade definida interna * 2,
comutação de direção de seleção do motor |
| Saída de E/S |
Saída isolada do optoacoplador de três canais; As funções de saída podem ser selecionadas com base nos parâmetros de saída alam, proximidade de posicionamento, detecção de velocidade consistente,
detecção de rotação do motor, preparação de servo, limite de torque, limite de velocidade, liberação do freio. |
| Entrada de pulso |
Entrada diferencial: 500 K; Circuito aberto do coletor: 200 K Suporta pulso + direção, pulso ortogonal AB, pulso CW + CCW |
| Saída de pulso |
Fase A e Fase B: Saída diferencial, com divisão de frequência arbitrária. Fase Z: Saída diferencial ou saída de circuito aberto do coletor |
| Comando de velocidade interno |
Três velocidades são distribuídas através do terminal de entrada |
| Capacidade de sobrecarga |
Máximo três vezes o torque |
| Entrada analógica |
Diferencial de entrada ± 10 V, um 0 a 10 V de terminação única e interruptor de acordo com o modo de controle |
| Função de comunicação |
Comunicação Modbus |
| Modo de controle l |
12 modos de controle Controle de posição, controle de velocidade, controle de torque, velocidade interna, controle de posição/velocidade, controle de posição/torque, controle de velocidade/torque,
velocidade/posição interna, velocidade/velocidade interna, velocidade/torque interno, fixação de velocidade/zero, controle de posição/proibição de comando |
| Resistência regenerativa |
400W:Sem resistor regenerativo externo;Mais de 750W:Sim |
Aplicativo

A aplicação de máquinas de furo lateral para marcenaria
A aplicação da máquina CNC de espiga dupla
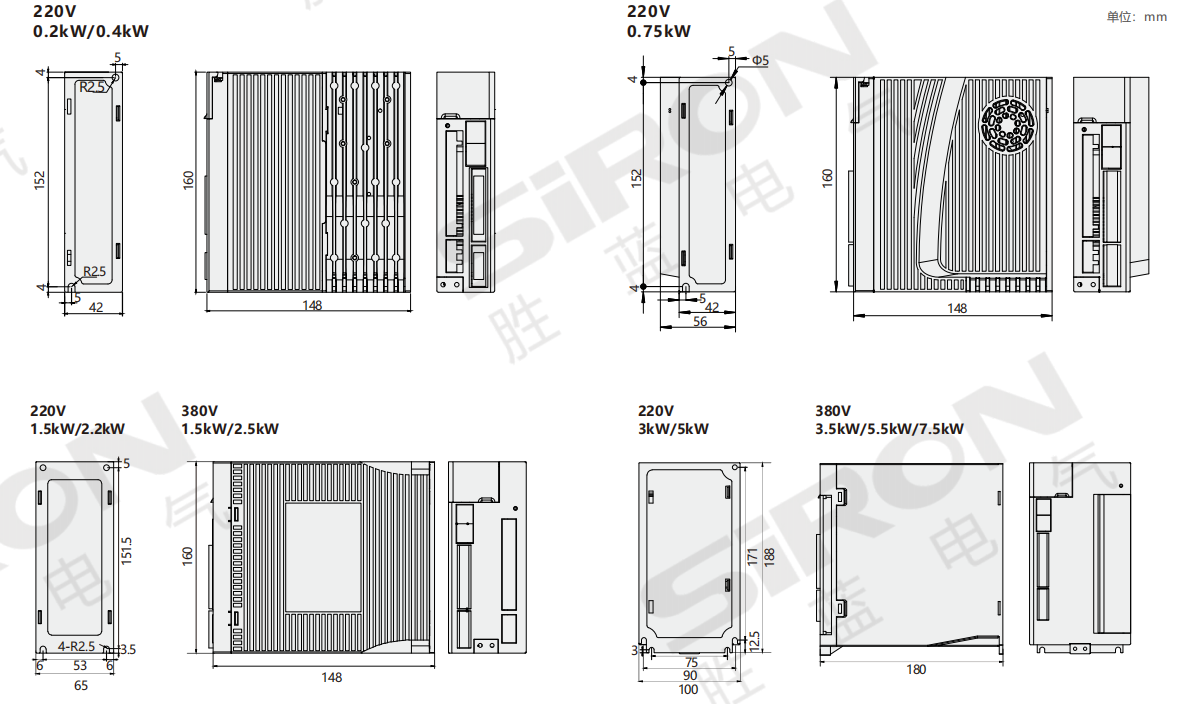
Desenho de contorno
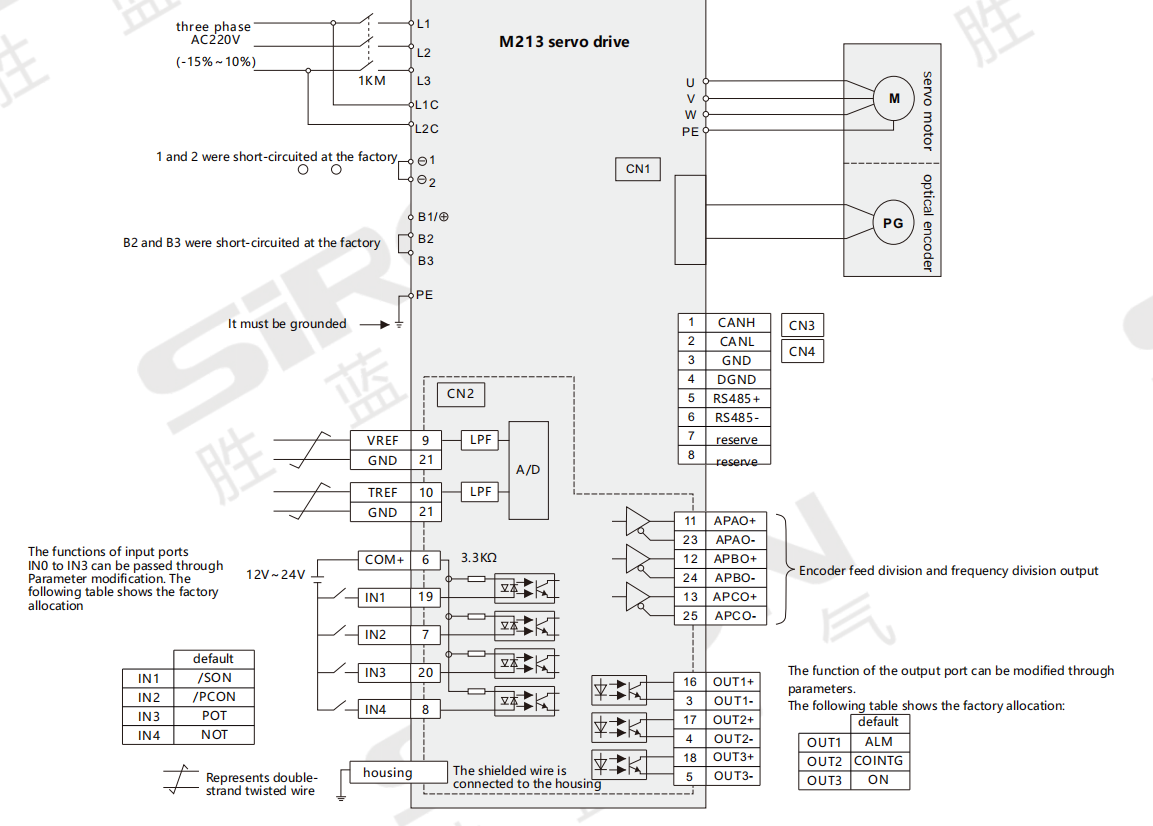
Introdução de Terminais
 |
Pinos de solda |
Definição |
Definição |
| L1、L2、L3 |
Terminal de alimentação principal |
CA trifásica 220V (-15%~10%,50/60Hz) |
| L1C, L2C |
Terminal de alimentação de controle |
CA monofásico 220 V (-15% ~ 10%, 50/60 Hz) |
| -1、-2、 |
Terminal do reator DC |
à saída da fábrica, -1.一2 entraram em curto-circuito |
| B1/+、一B2、B3 |
Terminal do resistor de freio |
Ao usar um resistor de frenagem externo, +Conecte o resistor de frenagem entre B1 e B2
Ao usar um resistor de frenagem interno,Curto-circuite B2 e B3(B2 e B3 foram
curto-circuitados na fábrica)。 |
| U、V、W、 |
Terminal do motor e
terminal de aterramento |
Deve corresponder um a um aos terminais UVW do motor |
| CN1 |
Terminal do codificador do motor |
Preste atenção à definição do terminal. Para obter detalhes, consulte 2.6.2 do manual |
| CN2 |
Terminal IO funcional |
Preste atenção à definição do terminal. Para obter detalhes, consulte 2.6.3 do manual |
| CN3 |
Terminal de comunicação |
Preste atenção à definição do terminal. Para obter detalhes, consulte 2.6.1 do manual |
| CN4 |
Diagrama do circuito principal
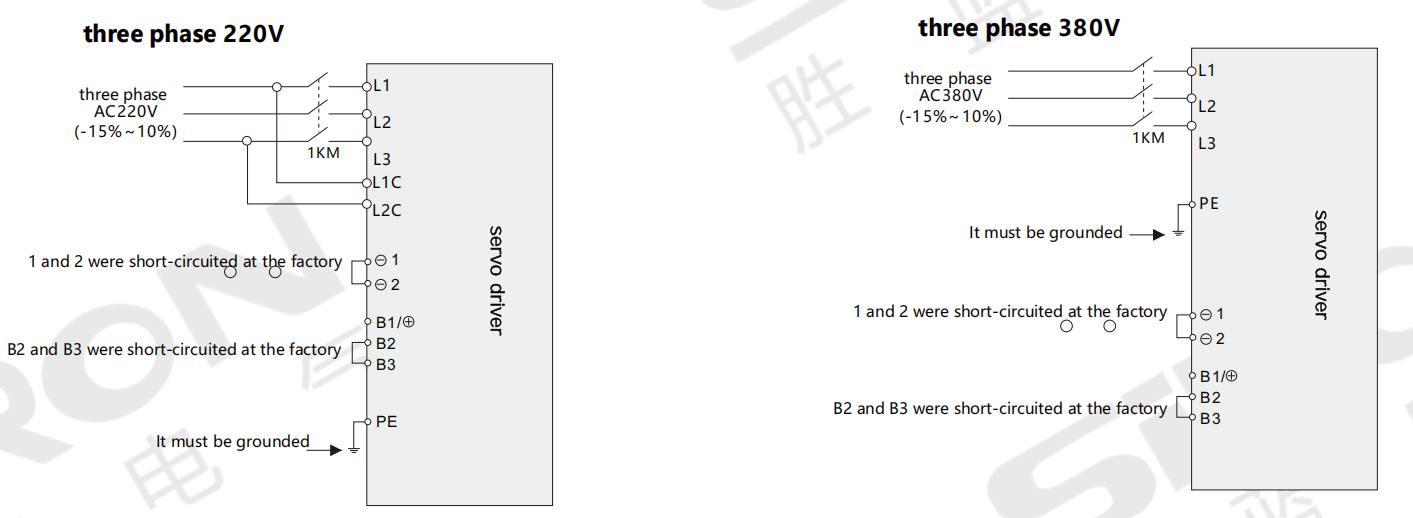
Diagrama de fiação do modo de localização
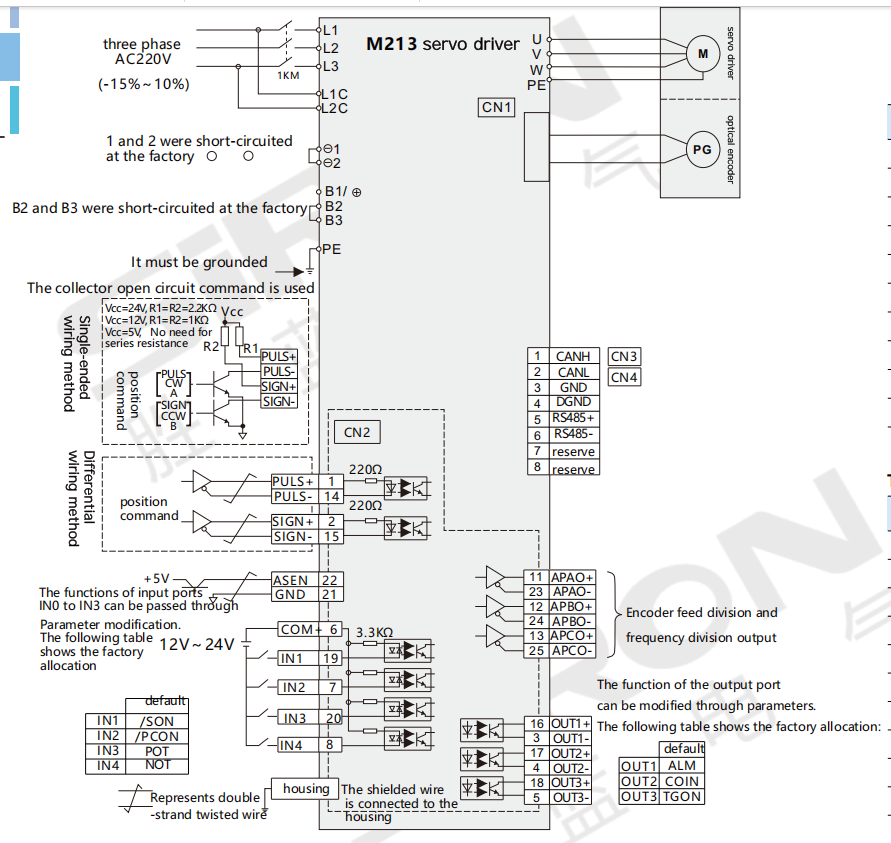
Os métodos convencionais de controle de posição normalmente envolvem pulso, direção, saída de alarme, eliminação de alarme, saída de freio, etc. A fiação e definição da linha de controle são as seguintes:
Terminal de controle de 25 núcleos
| Terminal servo 25core de alta densidade |
Lado do sistema |
Definir |
| 1 |
Pulso + |
Os resistores precisam ser conectados em série de acordo com diferentes tensões de pulso |
| 14 |
Pulso |
/ |
| 2 |
Direção + |
Os resistores precisam ser conectados em série de acordo com diferentes tensões de pulso |
| 15 |
Direção |
/ |
| 16 |
ALM+ |
ALM+ |
| 3 |
ALM- |
ALM- |
| 6 |
Público |
Conecte-se a |
| 19 |
COM+ |
Habilitar |
| 18 |
InlBrake+ |
BK+ |
| 5 |
Freio |
BK- |
As configurações dos parâmetros relevantes são as seguintes:
| Parâmetro |
Valor numérico |
Significado |
| PA100 |
400 |
Ganho de malha de velocidade |
| PA101 |
2000 |
Tempo integral do circuito de velocidade |
| PA102 |
400 |
Ganho do loop de posição |
| PA005 |
98 |
Modelo do motor: 130-15015 (MG) |
| PA006 |
20 |
Código do fabricante do motor |
| PA202 |
1 |
Molécula de relação de engrenagem eletrônica |
| PA203 |
1 |
O equipamento eletrônico é maior que o feminino |
| PA509 |
9901 |
Habilitação externa |
| PA514 |
30 |
BK define alocação |
| PA205 |
0 |
Tempo de aceleração e desaceleração de posição ms |
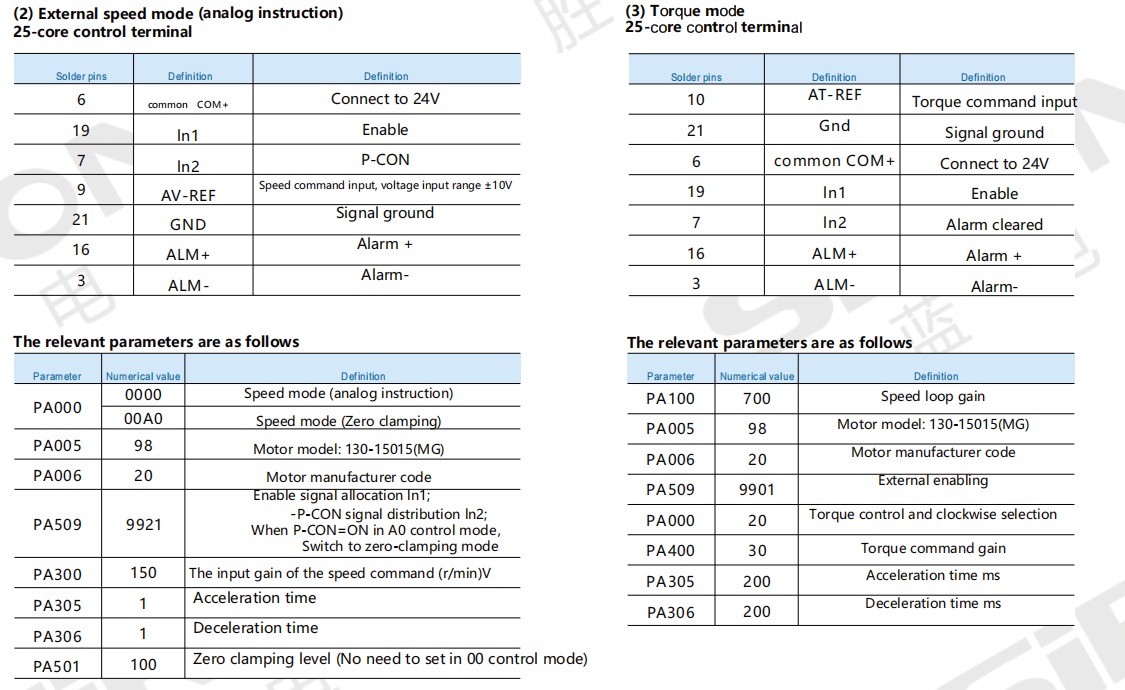
Diagrama de fiação do modo velocidade/torque
(1) Terminal de controle de 25 núcleos do modo de velocidade interna
| Pinos de solda |
Definição |
Definição |
| 6 |
COM+ comum |
Conecte a 24V |
| 19 |
Em1 |
FILHO ativar |
| 7 |
In2 |
Direção P-CON |
| 20 |
Em3 |
NCL |
| 8 |
Em4 |
PCL |
| 16 |
ALM+ |
Alarme + |
| 3 |
ALM- |
Alarme- |
Os parâmetros relevantes são os seguintes:
| Parâmetro |
Valor numérico |
Definição |
| PA000 |
30 |
Modo de velocidade interna |
| PA005 |
4 |
Modelo de motor 80-02430(MG) |
| PA006 |
20 |
Código do fabricante do motor |
| PA100 |
400 |
Ganho de malha de velocidade |
| PA509 |
9921 |
Habilitar alocação de sinal In1;Distribuição de sinal de direção In2 |
| PA510 |
3400 |
Distribuição de sinal NCL In3; Distribuição de sinal PCL In4 |
| PA301 |
100 Sábado por ele custema
hasdo |
NCL=ON,Velocidade do motor SPEED1 |
| PA302 |
200 Sábado perto do ousnemar tamal |
NCL=ON,PCL=ON,Velocidade do motor SPEED2 |
| PA303 |
300 |
Sentou perto de mim ouszemmrt
amale |
PCL=LIGADO,Velocidade do motor SPEED3 |
| PA305 |
200 |
Tempo de aceleração ms |
| PA306 |
200 |
Tempo de desaceleração ms |