O selekcji
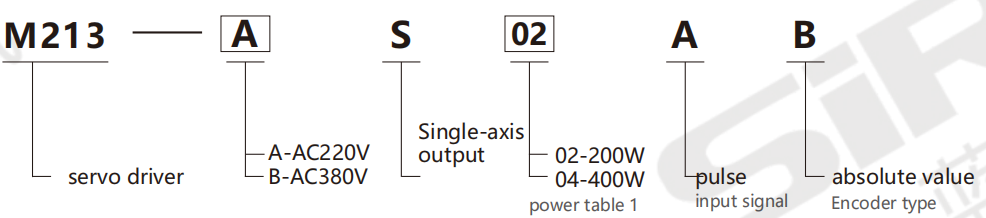
Przykład doboru: M213-AS02AB reprezentuje sterownik serwo serii M213, o napięciu zasilania 220 V AC, jednoosiowym trybie wyjściowym, mocy 200 W, sygnale wejściowym impulsowym i typie enkodera o wartości bezwzględnej.
Uwaga: 1. Napięcie zasilania AC220V: Zakres mocy do wyboru wynosi od 200 do 5000W. Napięcie zasilania AC380V: Możliwość wyboru mocy w zakresie 1800-7500W. Serwonapędy serii M213 można dopasować do serwomotorów serii M203 i M205.
Tabela 1: Moc
| Woltaż |
AC 220 V |
| Kod |
02 |
04 |
08 |
15 |
22 |
30 |
50 |
| Moc |
200 W |
400 W |
750 W |
1500 W |
2200 W |
3000 W |
5000 W |
| Prąd znamionowy |
2A |
2,8A |
5,5A |
10A |
12A |
16A |
25A |
| Woltaż |
AC 380 V |
| Kod |
15 |
25 |
35 |
55 |
75 |
| Moc |
1800 W |
3000 W |
3800 W |
5500 W |
7500 W |
| Prąd znamionowy |
5A |
8A |
12A |
16A |
20A |
Specyfikacja
| Nazwa |
Serwonapęd serii M213 |
| Iudutpower |
Metoda kontroli |
Trójfazowy przetwornik PWM z napędem sinusoidalnym |
Zasilanie obwodu głównego |
Trójfazowe 220 VAC/trójfazowe 380 VAC (-15 do +10%, 50 do 60 Hz) |
Moc kontrolna |
Trójfazowe 220 V: Jednofazowe 220 V AC (-15 do +10%, 50 do 60 Hz); Trójfazowe 380 V: Brak |
Prąd znamionowy |
220 V |
0,2 kW/2 A, 0,4 kW/2,8 A, 0,75 kW/5,5 A, 1,5 kW/10 A, 2,2 kW/12 A,
3 kW/16 A, 5 kW/25 A |
| 380 V |
1,8 kW/5 A, 3 kW/8 A, 3,8 kW/12 A, 5,5 kW/16 A,
7,5 kW/20 A |
| Informacje zwrotne od kodera |
enkoder absolutny |
| Temperatura i wilgotność środowiska |
Użyj temperatury otoczenia |
0 ~ 45 ℃ |
Temperatura przechowywania |
-20 ~ 65 ℃ |
Użyj wilgotności otoczenia |
Poniżej 20 do 85% RH (bez kondensacji) |
| Wilgotność środowiska przechowywania |
Poniżej 20 do 85% RH (bez kondensacji) |
| Stosować w celu ochrony otaczającego powietrza |
W pomieszczeniu (bez bezpośredniego światła słonecznego), wolnym od gazów korozyjnych, gazów palnych, mgły olejowej i pyłu |
| Wysokość |
Poniżej 1000 metrów wysokości |
| Wibracja |
Poniżej 5,8 m/s 2 (0,6 G), 10 ~ 60 Hz (nie można używać w sposób ciągły przy częstotliwości rezonansowej) |
| izolacja wytrzymuje napięcie |
Między początkującym a FG, AC1500V przez 1 minutę |
| Wprowadzenie do funkcji |
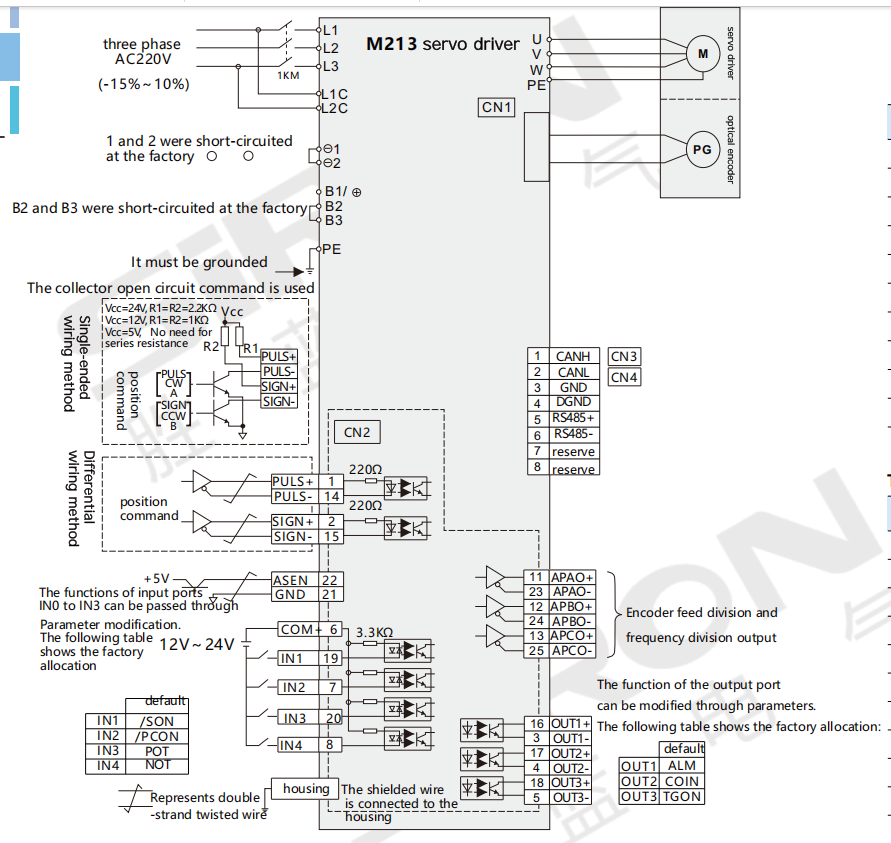
Wejście I0 |
4 wejścia (rozwiązanie transoptora DC24V) umożliwia wybór funkcji wejściowych zgodnie z parametrami WŁ. serwomechanizmu, Pakcja, zabronione obroty do przodu, zabronione obroty do tyłu,
kasowanie alarmu, ograniczenie momentu obrotowego obrotu do przodu Ograniczenie momentu obrotowego obrotu do tyłu, przełączanie trybu sterowania, stała pozycja zerowa, zerowanie odchylenia, wewnętrzne przełączanie zadanej prędkości*2,
przełączanie kierunku wyboru silnika |
| Wyjście I/O |
Trójkanałowe izolowane wyjście transoptorowe; Funkcje wyjściowe można wybierać w oparciu o parametry wyjściowe, bliskość pozycjonowania, wykrywanie stałej prędkości,
wykrywanie obrotów silnika, przygotowanie serwomechanizmu, ograniczenie momentu obrotowego, ograniczenie prędkości, zwolnienie hamulca. |
| Wejście impulsowe |
Wejście różnicowe: 500 K; Obwód otwarty kolektora: 200 K Obsługuje impuls + kierunek, impuls ortogonalny AB, impuls CW + CCW |
| Wyjście impulsowe |
Faza A i faza B: Wyjście różnicowe z dowolnym podziałem częstotliwości. Faza Z: Wyjście różnicowe lub wyjście z otwartym obwodem kolektora |
| Wewnętrzne polecenie prędkości |
Trzy prędkości są rozdzielane przez terminal wejściowy |
| Przeciążalność |
Maksymalnie trzykrotność momentu obrotowego |
| Wejście analogowe |
Różnica wejściowa ±10 V, jedno złącze single-ended od 0 do 10 V i przełącznik zgodnie z trybem sterowania |
| Funkcja komunikacji |
Komunikacja Modbus |
| Tryb sterowania l |
12 trybów sterowania Sterowanie pozycją, sterowanie prędkością, sterowanie momentem, prędkość wewnętrzna, sterowanie położeniem/prędkością, sterowanie położeniem/momentem obrotowym, sterowanie prędkością/momentem obrotowym,
wewnętrzna prędkość/pozycja, wewnętrzna prędkość/prędkość, wewnętrzna prędkość/moment obrotowy, zaciskanie prędkości/zera, kontrola położenia/zakaz poleceń |
| Odporność regeneracyjna |
400 W: Brak zewnętrznego rezystora regeneracyjnego; Ponad 750 W: Tak |
Aplikacja

Zastosowanie maszyn do obróbki drewna z otworami bocznymi
Zastosowanie czopiarki dwustronnej CNC
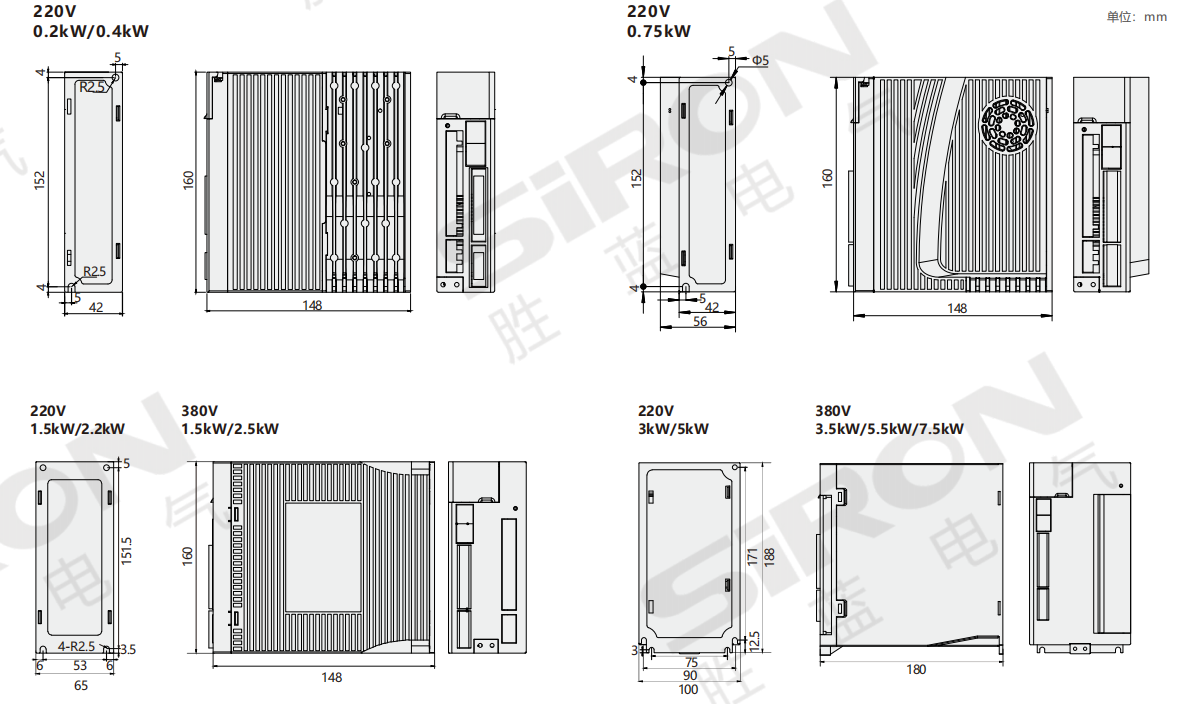
Rysunek zarysowy
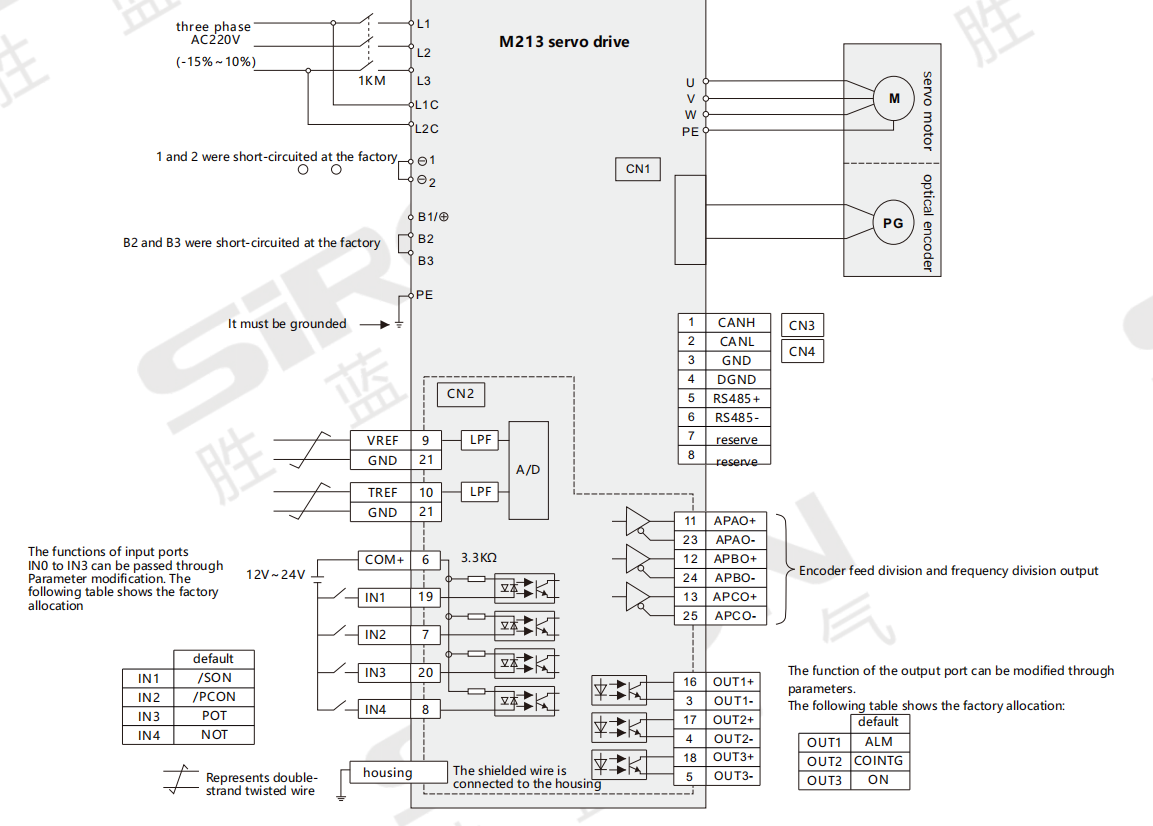
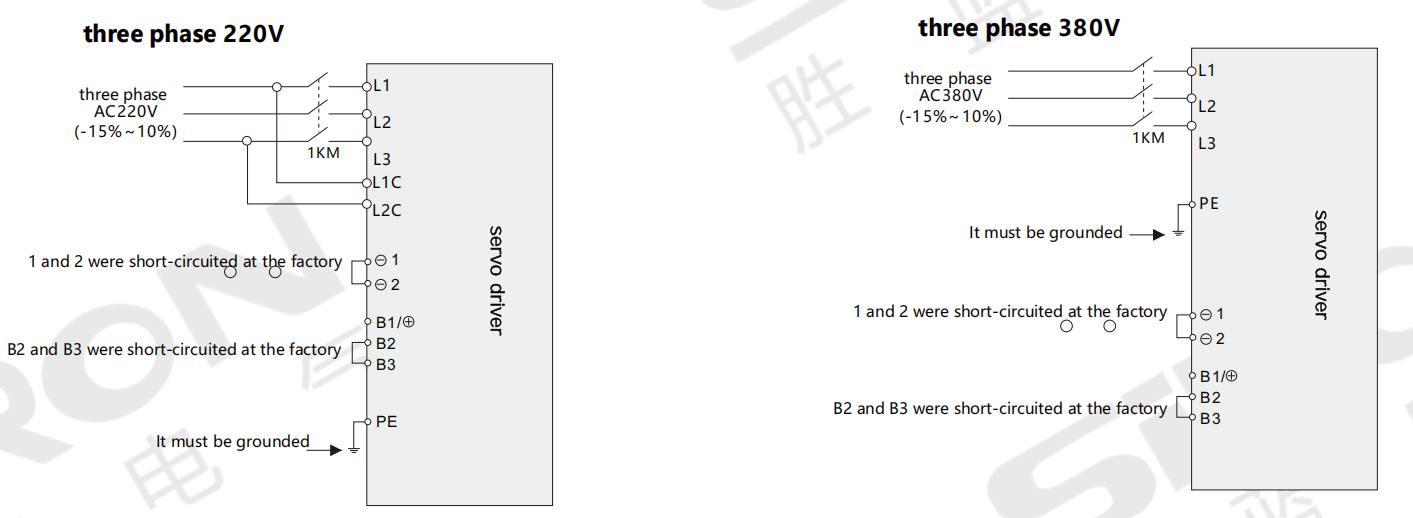
Wprowadzenie terminali
 |
Kołki lutownicze |
Definicja |
Definicja |
| L1, L2, L3 |
Główny terminal zasilania |
trójfazowy AC 220 V (-15% ~ 10%, 50/60 Hz) |
| L1C, L2C |
Zacisk zasilania sterującego |
jednofazowy AC 220 V (-15% ~ 10%, 50/60 Hz) |
| -1, -2, |
Terminal dławika prądu stałego |
fabrycznie, -1.一2 doszło do zwarcia |
| B1/+, 一B2, B3 |
Zacisk rezystora hamowania |
W przypadku korzystania z zewnętrznego rezystora hamowania, +Podłączyć rezystor hamowania pomiędzy B1 i B2.
W przypadku korzystania z wewnętrznego rezystora hamowania należy spowodować zwarcie B2 i B3 (B2 i B3 zostały
zwarte w fabryce). |
| U, V, W. |
Zacisk silnika i
zacisk uziemiający |
Musi odpowiadać w stosunku jeden do jednego zaciskom UVW silnika |
| CN1 |
Zacisk enkodera silnika |
Proszę zwrócić uwagę na definicję terminala. Szczegółowe informacje można znaleźć w punkcie 2.6.2 instrukcji |
| CN2 |
Funkcjonalny terminal IO |
Proszę zwrócić uwagę na definicję terminala. Szczegółowe informacje znajdują się w punkcie 2.6.3 instrukcji |
| CN3 |
Terminal komunikacyjny |
Proszę zwrócić uwagę na definicję terminala. Szczegółowe informacje można znaleźć w punkcie 2.6.1 instrukcji |
| CN4 |
Główny schemat obwodu
Schemat okablowania trybu lokalizacji
Konwencjonalne metody kontroli położenia zazwyczaj obejmują impuls, kierunek, wyjście alarmowe, kasowanie alarmu, wyjście hamulca itp. Okablowanie i definicja linii sterującej są następujące:
25-rdzeniowy terminal sterujący
| Terminal Servo 25core o wysokiej gęstości |
Strona systemu |
Określić |
| 1 |
Puls + |
Rezystory należy połączyć szeregowo zgodnie z różnymi napięciami impulsowymi |
| 14 |
Puls |
/ |
| 2 |
Kierunek + |
Rezystory należy połączyć szeregowo zgodnie z różnymi napięciami impulsowymi |
| 15 |
Kierunek |
/ |
| 16 |
ALM+ |
ALM+ |
| 3 |
ALM- |
ALM- |
| 6 |
Publiczny |
Połącz się z |
| 19 |
COM+ |
Włączać |
| 18 |
InlBrake+ |
BK+ |
| 5 |
Hamulec |
BK- |
Odpowiednie ustawienia parametrów są następujące:
| Parametr |
Wartość liczbowa |
Oznaczający |
| PA100 |
400 |
Wzmocnienie pętli prędkości |
| PA101 |
2000 |
Czas całkowania pętli prędkości |
| PA102 |
400 |
Wzmocnienie pętli położenia |
| PA005 |
98 |
Model silnika: 130-15015 (MG) |
| PA006 |
20 |
Kod producenta silnika |
| PA202 |
1 |
Elektroniczna cząsteczka przełożenia skrzyni biegów |
| PA203 |
1 |
Sprzęt elektroniczny jest większy niż żeński |
| PA509 |
9901 |
Zewnętrzne włączanie |
| PA514 |
30 |
BK definiuje alokację |
| PA205 |
0 |
Czas przyspieszania i zwalniania pozycji ms |
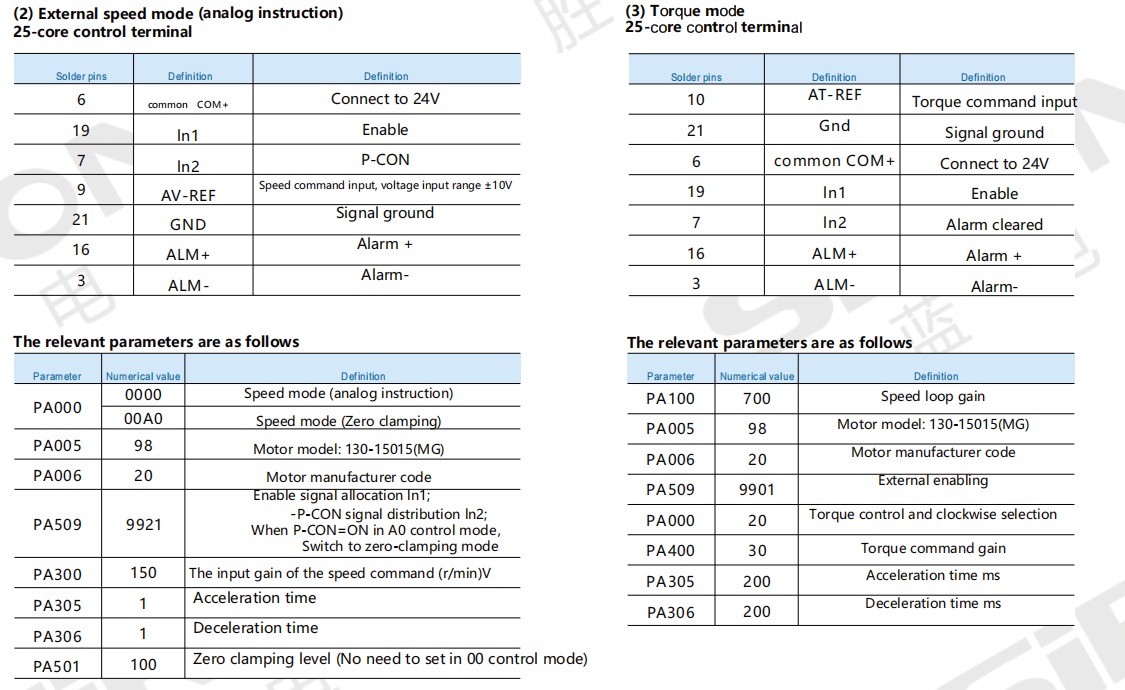
Schemat okablowania trybu prędkości/momentu obrotowego
(1) 25-rdzeniowy zacisk sterujący trybu prędkości wewnętrznej
| Kołki lutownicze |
Definicja |
Definicja |
| 6 |
wspólny COM+ |
Podłącz do 24V |
| 19 |
W1 |
SON włączyć |
| 7 |
We2 |
Kierunek P-CON |
| 20 |
W3 |
NCL |
| 8 |
W4 |
PCL |
| 16 |
ALM+ |
Alarm + |
| 3 |
ALM- |
Alarm- |
Odpowiednie parametry są następujące:
| Parametr |
Wartość liczbowa |
Definicja |
| PA000 |
30 |
Tryb prędkości wewnętrznej |
| PA005 |
4 |
Model silnika 80-02430(MG) |
| PA006 |
20 |
Kod producenta silnika |
| PA100 |
400 |
Wzmocnienie pętli prędkości |
| PA509 |
9921 |
Włącz przydział sygnału In1; Dystrybucja sygnału kierunku In2 |
| PA510 |
3400 |
Dystrybucja sygnału NCL In3; Dystrybucja sygnału PCL In4 |
| PA301 |
100 sob. Byhe custema
hasdo |
NCL=ON, prędkość silnika SPEED1 |
| PA302 |
200 Usiadłem przy osnemar tamal |
NCL=WŁ., PCL=WŁ., PRĘDKOŚĆ silnika 2 |
| PA303 |
300 |
Usiadł obok mnie ouszemmrt
amale |
PCL=WŁ., PRĘDKOŚĆ silnika SPEED3 |
| PA305 |
200 |
Czas przyspieszania ms |
| PA306 |
200 |
Czas hamowania ms |